АПК сверхточного позиционирования хирургического инструмента
Аппаратно-программный комплекс для сверхточного определения координат хирургического инструмента внутри тела пациента при планировании и проведении малоинвазивных операций, в том числе операций на головном мозге.

Задача
При проведении малоинвазивных операций остро стоит необходимость в контроле движения инструмента внутри тела пациента, так как зачастую кончик инструмента может быть полностью скрыт от хирурга. При выполнении операций на жизненно важных органах точность позиционирования должна составлять 0,5 – 1мм или выше, так как сдвиг инструмента может привести к нежелательным последствиям.
Задачей разработчиков стало:
- Создание аппаратного решения для определения координат хирургического инструмента внутри тела пациента со сверхвысокой точностью при проведении малоинвазивных операций;
- Создание программного обеспечения для обработки и отображения полученной информации на терминале хирургической навигационной станции.
Решение
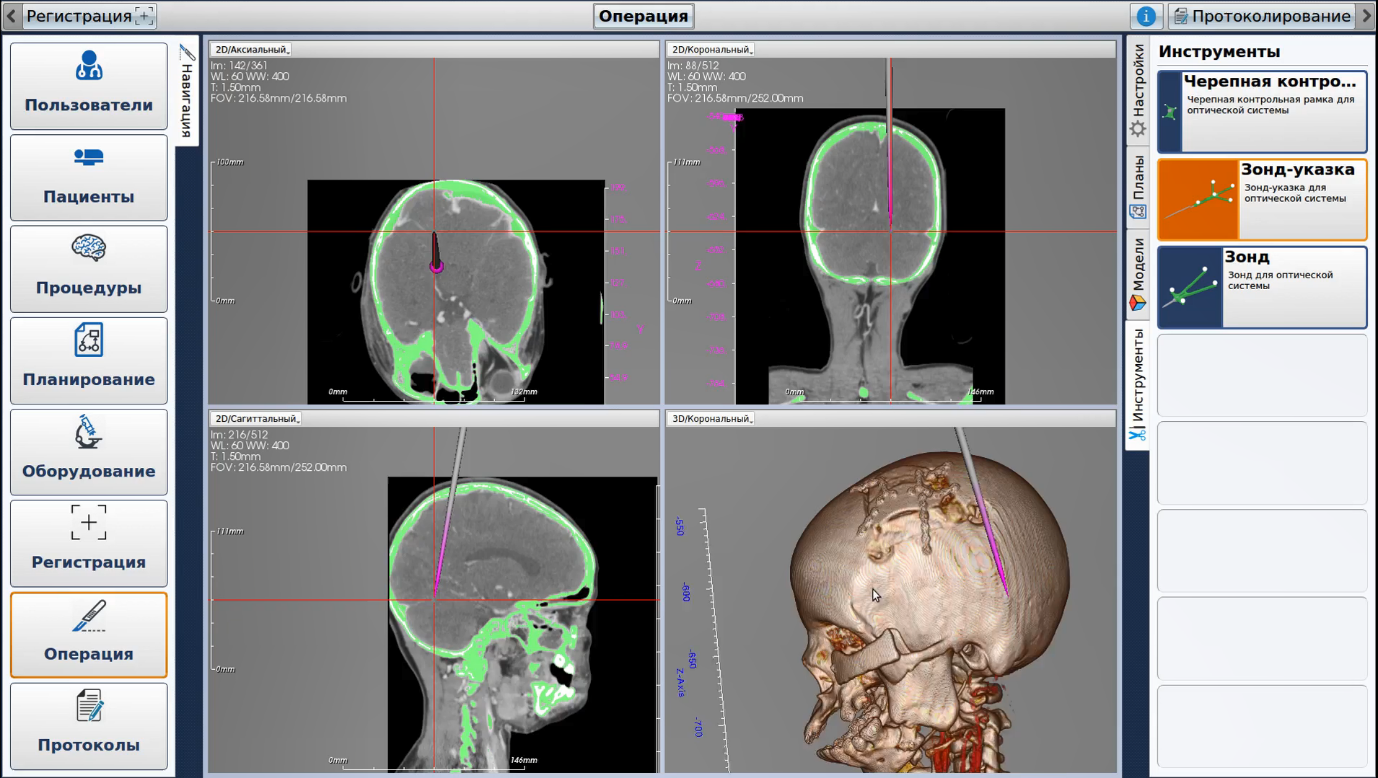
Разработана система хирургической навигации и средства интраоперационной визуализации, позволяющие в режиме реального времени получать информацию об анатомических особенностях пациента, расположении инструментов, состоянии патологии и месте операционного вмешательства при планировании и в ходе операции в режиме реального времени. Аппаратно-программный комплекс может использоваться в операционных как вспомогательный инструмент при проведении малоинвазивных операций, в том числе операций на головном мозге.
Современные методы обследования, такие как компьютерная томография (КТ) и магнитно-резонансная томография (МРТ) позволяют получить набор данных, которые можно объединить в трёхмерную модель обследованной области человеческого тела. Это позволяет перед проведением операции выполнять интерактивное исследование тела пациента, а также отображать положение хирургического инструмента на трёхмерной модели пациента в режиме реального времени.
Состав хирургической навигационной станции:
- Рабочая станция хирурга
- Модуль оптической навигации
- Средства визуализации
- Прочие подключаемые модули: микроскоп, модуль магнитной навигации, С–дуга и др.
Аппаратно-программный комплекс со сверхвысокой точностью определяет координаты хирургического инструмента внутри тела пациента (до 1мм в рабочем объёме 1.5м х 1.5м х 1.5м на дистанции 1м).
Отображение координат хирургического инструмента показывается на трёхмерной модели человека, полученной в результате обработки результатов компьютерной томографии (КТ) или магнитно-резонансной томографии (МРТ).
Преимущества:
- Низкая стоимость по сравнению с зарубежными аналогами. Сейчас в России не существует аналогов хирургическим навигационным станциям зарубежного производства. Стоимость такого прибора в США составляет примерно 500 тыс $, что сужает круг российских медучреждений, обладающих достаточным бюджетом для его покупки. Отечественная станция обладает теми же функциональными характеристиками, но стоит около 15 млн руб. - более чем в 2 раза дешевле импортного оборудования.
- Снижение затрат на расходные материалы, обслуживание и ремонт благодаря использованию широко распространенных стандартных компонентов;
- Масштабируемость благодаря наличию интерфейса, обеспечивающего возможность поддержки новых типов операций и оборудования.
Детали
Решение задачи состояло из двух частей: создание аппаратного решения для определения координат хирургического инструмента и создание программного обеспечения для обработки и отображения полученной информации на терминале хирургической навигационной станции.
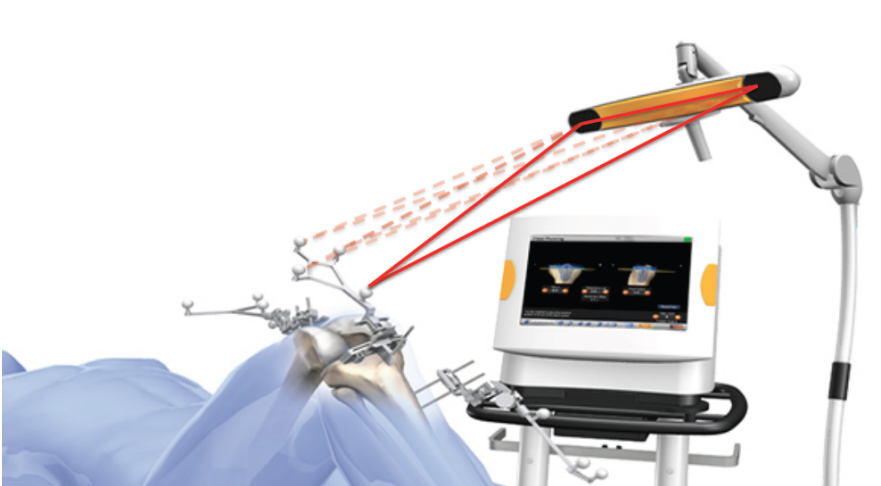
Оптический модуль
Принцип работы оптического модуля основан на использовании двух камер узкого спектра в стереорежиме:
- Активный инфракрасный излучатель с длиной волны 850 нм подсвечивает специальные сферические маркеры, расположенные на инструментах или оборудовании;
- Отраженный сигнал детектируют стереокамеры;
- На основании координат маркеров определяется тип инструмента или оборудования и его координаты относительно референсной рамки.
Инструменты

Задачи оптического модуля
- Получить 2d координаты оптических маркеров на изображениях с обеих камер;
- Передать полученные данные на рабочую станцию хирурга для последующей обработки и вычисления 3d координат;
- Производить обработку в режиме реального времени - не менее 25 кадров в секунду.
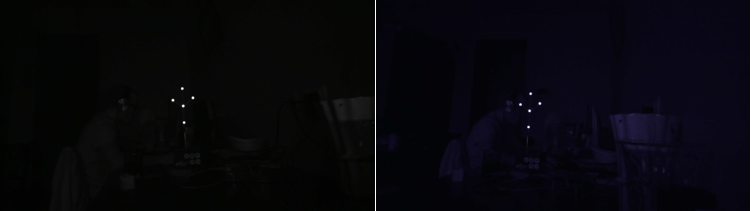
Примеры изображений, поступающих с камер.
Процесс обработки данных:
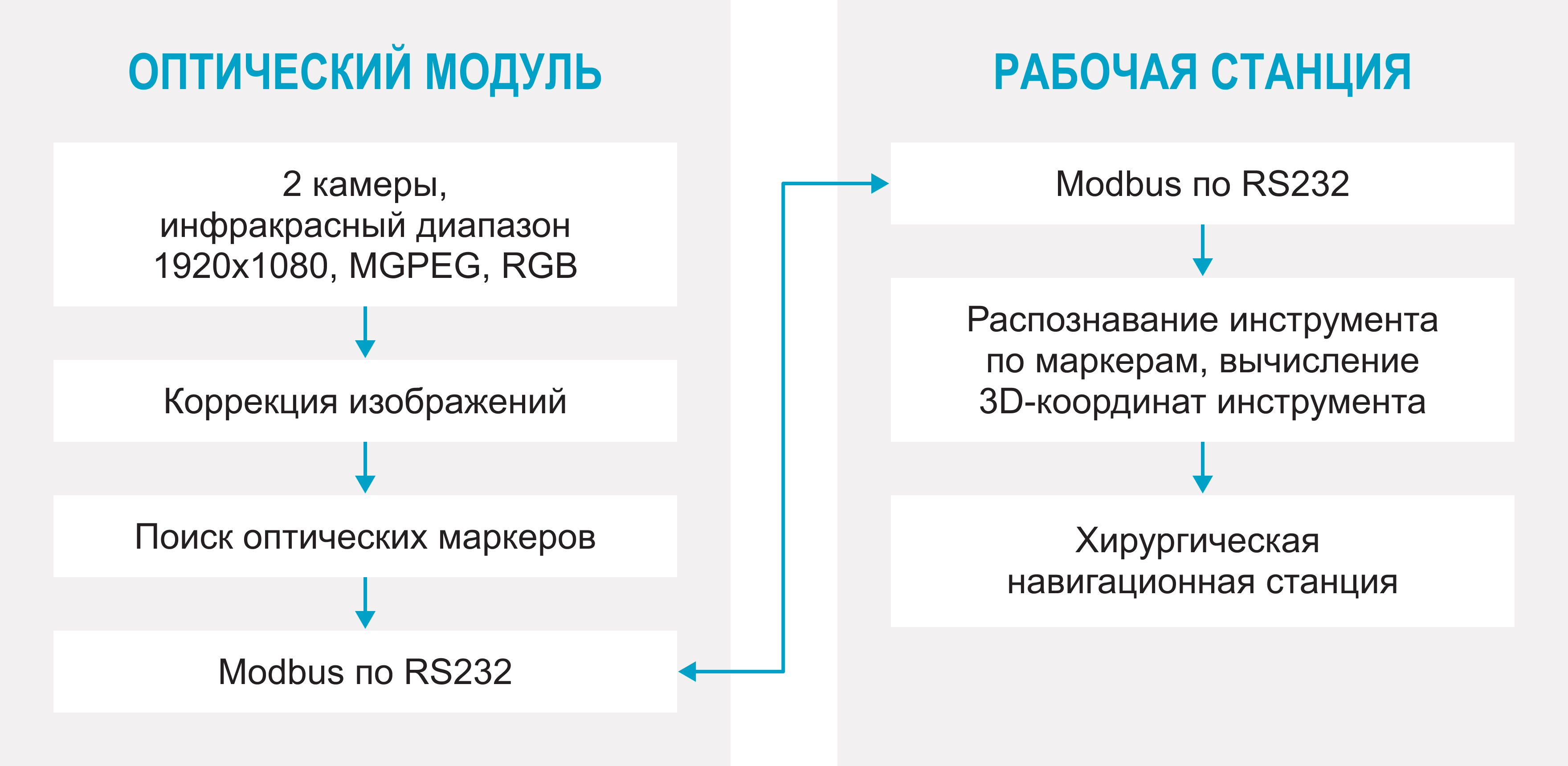
В дальнейшем планируется перейти на одноцветную матрицу, т. к. в процессе коррекции производится перевод изображения в одноканальный формат.
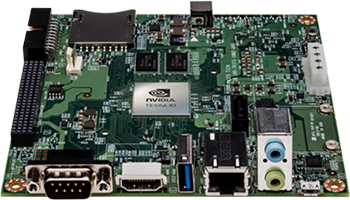
Аппаратная часть
Платформа nVidia Jetson TK1:
- 4х ядерный ARM процессор A-15 1.8GHz;
- NVIDIA Kepler GPU c 192 ядрами CUDA;
- 2 ГБ памяти х16, 64-битная шина;
- Порт RS232.
- 2 камеры FULL HD 1920*1080 RGB usb 2.0;
- Объективы KOWA LM3NCM с углом обзора 89.00° по вертикали и 73.80° по горизонтали;

- Инфракрасные осветители 850 нм с углом 50°
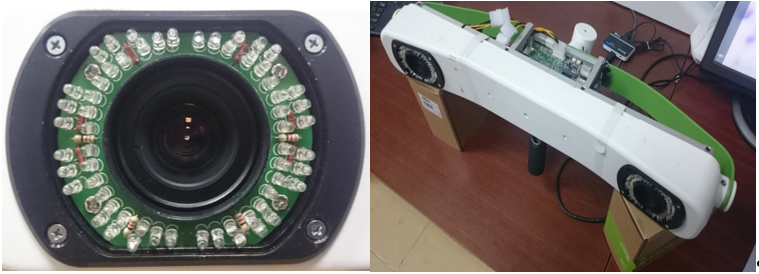
Определение координат хирургического инструмента выполняется при помощи системы технического зрения, состоящей из двух камер высокого разрешения, работающих в инфракрасном диапазоне. Для облегчения поиска и обнаружения хирургического инструмента, на самом инструменте располагаются специальные пассивные маркеры, светящиеся в инфракрасном диапазоне. Для обеспечения свечения пассивных маркеров в составе системы технического зрения предусмотрена инфракрасная подсветка, освещающая рабочую область проведения операции.
Для отображения анатомических структур пациента во время операции разработанная система обеспечивает:
- Чтение DICOM формата;
- Визуализацию: объемной модели, хирургических инструментов, оптических и магнитных датчиков;
- Сегментацию объемной модели;
- Обработку изображений;
Для возможности поддержки новых типов операций и оборудования система является масштабируемой.
Отказоустойчивость системы обеспечивается за счет сохранения состояния системы, возможности перезагружать отдельные модули в случае исключения или отказа, а также контроля состояния процесса приложения, включающего перезапуск приложения в случае отказа (с загрузкой последнего состояния).
Интерфейс программного обеспечения хирургической навигационной станции
Технические преимущества
- Уникальная конструкция осветителей с разработанной топологией светодиодов, обеспечивающая равномерное освещение операционного поля;
- Использование нестандартных алгоритмов для субпиксельной точности определения координат: погрешность измерения 0.5 пикселя. Данная точность позволяет проводить вычисления трехмерных координат в области операционного поля с точностью до 1 мм.
Технологии
| Языки программирования и фреймворки | C/C++, QT |
| Библиотеки | OpenCV, OpenCL, GLM, Modbus |
| OS | Unix |
| Средства автоматизированного проектирования (САПР) | Autodesk Fusion 360, DipTrace |
| Микроконтроллеры | AVR |
| Среды разработки ПО для микроконтроллеров | AVR Studio |
Публикации
Ключевые исполнители
- Руководитель проекта: А.В. Лексашов
- Инженер: Г.С. Васильянов
- Программисты: К.О. Беляевский, С.В. Таммсаар, Д.С. Баринов