Solution for ultra-precise determination of the coordinates of a surgical instrument
Hardware-software complex for ultra-precise determination of the coordinates of a surgical instrument inside the patient’s body is imperative when planning and conducting minimally invasive operations, including brain surgery.

Task
When conducting minimally invasive operations, the need to control the movement of the instrument inside the patient’s body is quite urgent, because often the tip of the instrument can be completely hidden from the surgeon. When performing operations on vital organs, the positioning accuracy should be 0.5 - 1 mm or higher, since the shift of the tool can lead to unintended consequences.
The task of the developers is:
- Creation of a hardware solution for determining the coordinates of a surgical instrument inside the patient’s body with ultra-high accuracy in the course of minimally invasive operations
- Creation of software for processing and displaying the received information at the terminal of the surgical navigation station.
Solution
A surgical navigation system and intra-operative visualization tools have been developed; they allow receiving real-time information about the anatomical features of the patient, the location of the instruments, the condition of the pathology and the location of the surgical intervention during planning and executing the operation in the real-time mode. The hardware-software complex can be used in operating rooms as an auxiliary tool in the course of minimally invasive operations, including brain surgery.
Present-day examination methods, such as computed tomography (CT) and magnetic resonance imaging (MRI), provide a set of data that can be combined into a three-dimensional model of the examined area of the human body. This allows performing an interactive study of the body of the patient before surgery, as well as displaying the position of the surgical instrument on a patient three-dimensional model in the real-time mode.
The composition of a surgical navigation station:
- Surgeon's workstation
- Optical navigation module
- Visualization tools
- Other plug-ins: microscope, magnetic navigation module, C-arc, etc.
The hardware-software complex with ultra-high accuracy determines the coordinates of the surgical instrument inside the patient’s body (up to 1 mm in the working volume of 1.5mx1.5mx1.5m at a distance of 1m).
The display of the coordinates of the surgical instrument is shown on a three-dimensional human model obtained by processing the results of computer tomography (CT) or magnetic resonance imaging (MRI).
Advantages:
- Low cost in comparison with foreign analogues. Presently, there are no analogues to foreign-made surgical navigation stations in Russia. The cost of such a device in the United States approximately amounts to $ 500,000, which narrows the circle of Russian medical institutions that have sufficient budgets for its purchasing. The domestic station has the same functional characteristics, but costs about 15 million rubles, which is more than two times cheaper than the imported equipment.
- Reduced consumables, maintenance, and repair costs through the use of commonly used standard components.
- Scalability due to the presence of an interface that provides the ability to support new types of operations and equipment.
Details
The solution to the problem comprised two parts: the creation of a hardware solution for determining the coordinates of a surgical instrument and the creation of software for processing and displaying the information received at the terminal of a surgical navigation station.
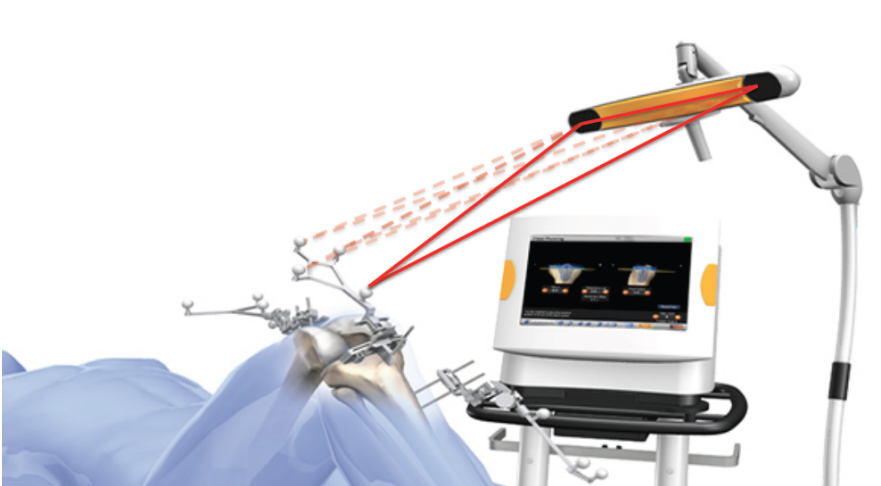
Optical module
The operation principle of the optical module is based on the use of two narrow-spectrum cameras in stereo mode:
- An active infrared emitter with a wavelength of 850 nm illuminates special spherical markers is located on the tools or equipment.
- Stereo cameras detect the reflected signal.
- Based on the coordinates of the markers, the type of tool or equipment and its coordinates relative to the reference frame are determined.
Инструменты

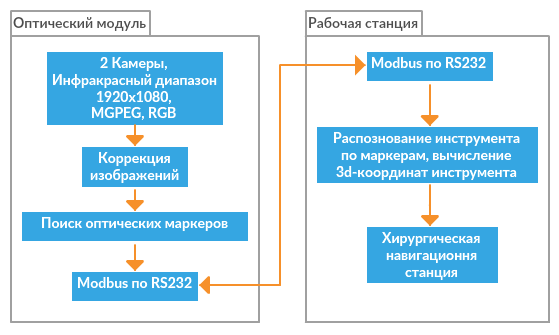
Tasks of the optical module
- Receive 2D coordinates of optical markers on the images from both cameras
- Transfer the received data to the surgeon's workstation for subsequent processing and calculation of 3D coordinates
- Perform processing in the real-time mode: at least 25 frames per second.
Examples of camera images
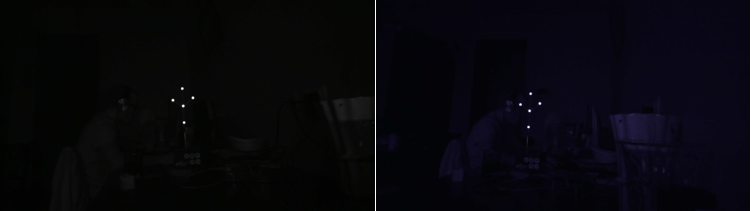
Data processing:
In future, it is planned to switch to a single-color matrix, because in the process of correction, images are converted to a single-channel format.
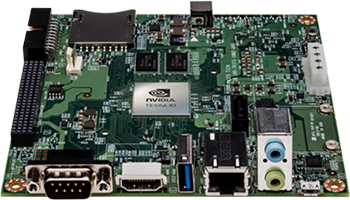
Hardware
- Platform: nVidia Jetson TK1:
- 4-core ARM processor A-15 1.8GHz
- NVIDIA Kepler GPU with 192 CUDA cores
- 2 GB in-memory storage х 16, 64-bit bus
- RS232 Port.
- 2 cameras FULL HD 1920*1080 RGB usb 2.0;
- KOWA LM3NCM lenses with 89.00° viewing angle vertically and 73.80° horizontally;

- Infrared illuminators, 850nm, 50° wide angle.
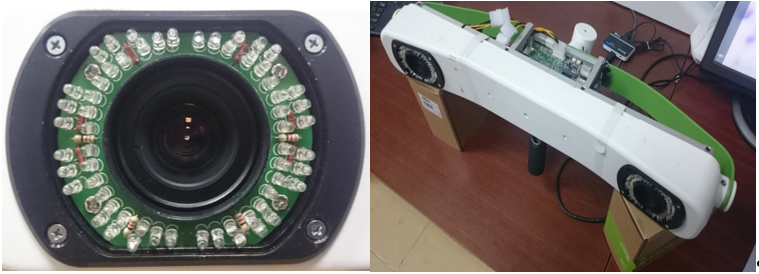
The determination of the coordinates of a surgical instrument is performed with the use of a vision system consisting of two high-resolution cameras operating in the infrared range. To facilitate the search and detection of a surgical instrument, special passive markers glowing in the infrared range are located on the instrument. To ensure the luminescence of passive markers, an infrared illumination is provided as part of the vision system, illuminating the working area of the surgery.
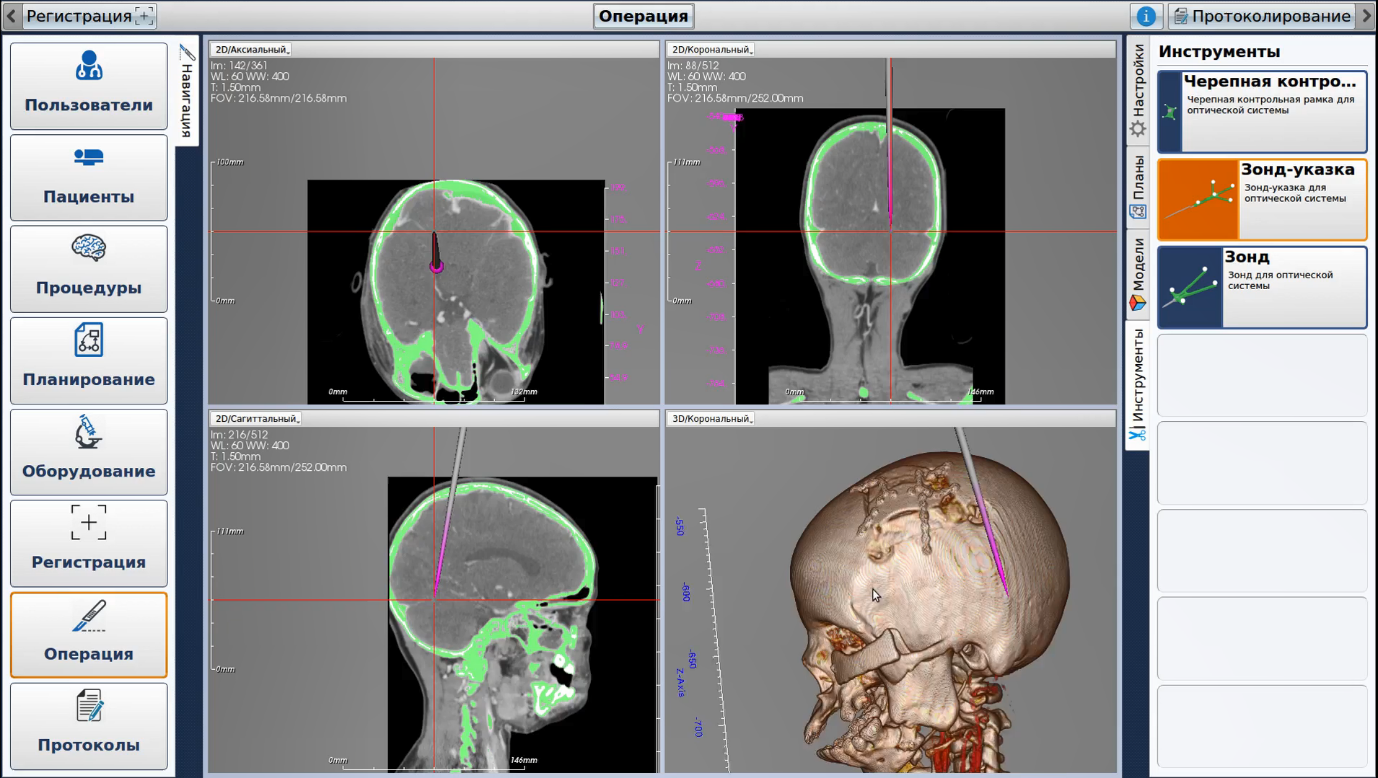
To display the anatomical structures of the patient during the surgery, the developed system provides for:
- DICOM format reading
- Visualization of:
- The volumetric model
- Surgical instruments
- Optical and magnetic sensors
- Volume model segmentation
- Image processing
To support new types of operations and equipment, the system is scalable.
System fault tolerance is ensured by maintaining the state of the system, the ability to restart individual modules in the event of an exception or failure, as well as monitoring the state of the application process, including restarting the application in the event of a failure (with loading of the last state).
Surgical navigation station software interface
- The unique design of illuminators with a developed topology of LEDs, providing consistent illumination of the surgical area
- The use of non-standard algorithms for sub-pixel accuracy of coordinates determination with measurement error of 0.5 pixels; this accuracy allows the calculation of three-dimensional coordinates in the field of the surgical area with the accuracy of 1mm.
Technologies
| Software programming languages and frameworks | C/C++, QT |
| Libraries | OpenCV, OpenCL, GLM, Modbus |
| OS | Unix |
| CAD tools (Computer-Aided Design tools) | Autodesk Fusion 360, DipTrace |
| Microcontrollers | AVR |
| Integrated development environment for microcontrollers | AVR Studio |
Publications
Project team
- Project manager: A. Leksashov
- Engineer: G. Vasilianov
- Programmers: K. Belyaevsky, S. Tammsaar, D. Barinov