VR-лаборатория для моделирования работы портального крана
Интерактивный учебно-демонстрационный комплекс для изучения конструкции и эксплуатационных характеристик портального крана.

Задача
Учебный виртуально-демонстрационный комплекс «Изучение сложных шарнирно-сочлененных стреловых систем на примере работы портального крана» разработан в рамках Программы повышения качества образования и подготовки кадров ПАО «Газпром»/ФГАОУ ВО «СПбПУ».
Цель – совершенствование образовательного процесса по профильным для ПАО «Газпром» направлениям подготовки в Высшей школе транспорта Института машиностроения, материалов и транспорта СПбПУ.
VR-приложение разработано для изучения кинематики и силовых факторов в шарнирно-сочлененных стреловых системах на примере портального крана. Назначение разработки – углубление понимания принципов работы шарнирно-сочлененных стреловых систем, взаимосвязи между геометрическими и силовыми параметрами в них, изучение устройства портальных кранов.
Комплекс позволяет моделировать эксплуатационные нагружения на основе интеграции математической модели шарнирно-стреловой системы крана с виртуальной моделью крана.
Математическая модель позволяет варьировать различные геометрические и силовые исходные параметры, что отображается в виртуальной модели. Это позволяет понять принципы работы сложных геометрически изменяемых систем и научиться грамотно подбирать исходные параметры для вновь создаваемых машин, т.к. данный комплекс сразу позволяет визуализировать то, что может получиться на основании данных, выбранных обучающимся.
Виртуальная модель создана по аналогии с реальным объектом ПАО «Газпром» в порту Пеледуй.
Решение
Для виртуальной лаборатории были созданы 3D-модели портального крана в виртуальном окружении (порт, водоем, сухогрузы, контейнеры) и выполнена программная реализация виртуального пространства. Также разработан сценарий действий: студент, предварительно изучивший теорию, самостоятельно выбирает в приложении параметры стреловой системы и в процессе управления краном получает наглядное представление о его работе.
Прототипом компьютерной модели стал перегрузочный портальный кран «Кировец» производства ПО «ТЕХНОРОС» – один из основных типов кранов в морских и речных портах России. Он отличается прочной, грамотно составленной конструкцией, благодаря чему может работать в любых погодных условиях. Образцом для создания виртуального окружения выбран грузовой причал ПАО «Газпром» в поселке Пеледуй на реке Лене в Якутии.
В VR-приложении используется математическая модель портального крана, которую разработали сотрудники Высшей школы транспорта Института машиностроения, материалов и транспорта СПбПУ. Математическая модель построена на анализе закономерностей движения элементов крана и распределения нагрузок на его элементы. Разработчики Лаборатории ПСПОД реализовали программный модуль для ее интеграции, благодаря чему модель выполняется в VR-приложении в режиме реального времени.
В начале работы пользователь конфигурирует основные элементы крана, таким образом задавая часть входных данных для математической модели. Остальные параметры (текущий вылет и масса переносимого груза), определяются динамически во время выполнения приложения - управления краном.
Выходными данными модели являются параметры, отражающие воздействие на элементы крана при заданных входных данных. Расчеты значений отдельных показателей выводятся на виртуальных дисплеях, а также визуализируются с помощью графиков и системы цветовой подсветки элементов. Графики помогают отобразить изменения параметров во времени, а подсветка показывает нагрузку на отдельные части крана, например, на хобот или стрелу. Цвет нагрузки меняется от синего до красного. Таким образом, визуализация данных математической модели помогает следить за состоянием элементов крана в каждый момент времени и анализировать их положения, выявляя наихудшие с точки зрения нагруженности. Для реалистичности и точности работы приложения необходимы непрерывные данные, поэтому в систему встроен инструмент интерполяции.
Фактически, в приложении средствами виртуальной реальности создается цифровой двойник портального крана, который позволяет пользователям в процессе выполнения учебных заданий изучить закономерности его работы при различных сочетаниях входных параметров, таких как конфигурация элементов крана, величина вылета и масса груза. Также цифровой двойник крана может в будущем выполнять больше функций за счет возможностей математической модели и гибкости системы визуализации.
В основе приложения лежит принцип кроссплатформенности. Разработаны две версии ПО, одна – для использования с VR-комплектом (VR-очки, манипуляторы), другая – для обычных ПК со стандартными устройствами ввода (клавиатура, мышь).

Прототип перегрузочного портального крана «Кировец» (ПО «Технорос»)

Основные элементы крана выбираются пользователем перед началом работы
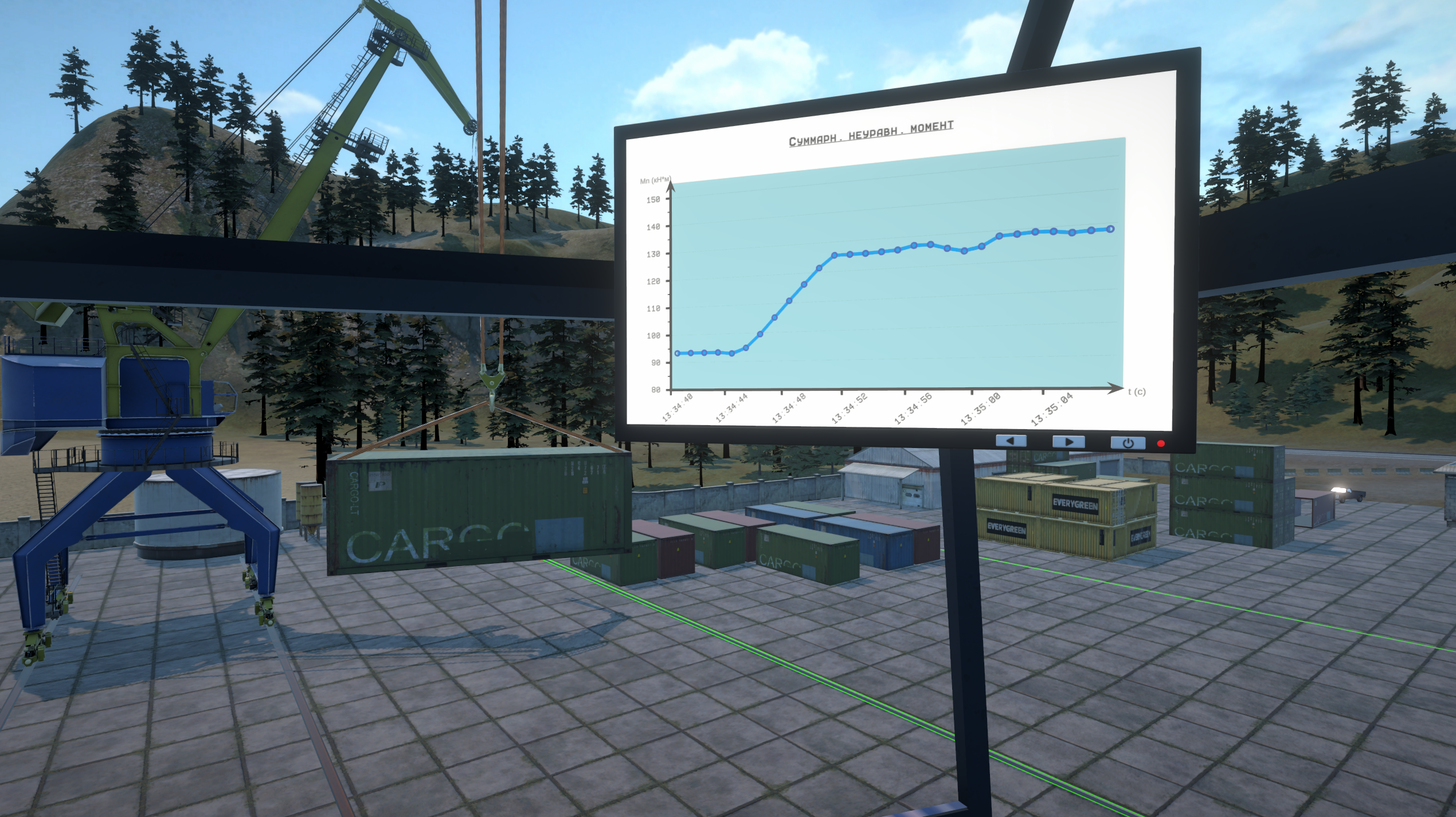
Вывод интерполированных данных на виртуальные дисплеи в виде графиков помогает отобразить изменения параметров во времени
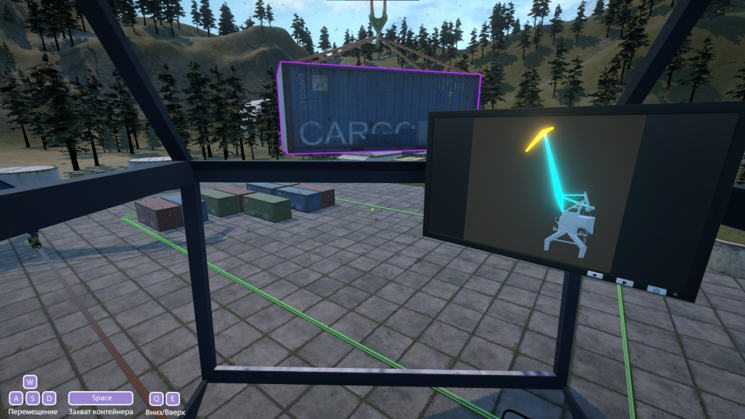
Цветовая визуализация нагрузки элементов: подсветка показывает нагрузку на отдельные части крана
Технологии
| Среда разработки 3D | Blender, Substance 3D Painter, Marmoset Toolbag |
| Среда разработки ПО | Unity, Visual Studio, JetBrains Rider |
| VR-комплекты | HTC VIVE PRO, Oculus Rift S и другие гарнитуры, совместимые с OpenXR |
| Языки программирования и фреймворки | С# |
Ключевые исполнители
Руководитель проекта: М.В. Болсуновская, заведующий Лабораторией «Промышленные системы потоковой обработки данных» ПИШ СПбПУ
Консультант: А.А. Грачев, к.т.н., директор Высшей школы транспорта Института машиностроения, материалов и транспорта СПбПУ
Разработчик мат. модели: С.В. Никитин, к.т.н., доцент Высшей школы транспорта Института машиностроения, материалов и транспорта СПбПУ
Партнеры
- ПАО «Газпром»
- Высшая школа транспорта Института машиностроения, материалов и транспорта СПбПУ