Модель беспилотного автомобиля
Листовка о проектеМалогабаритная модель беспилотного автомобиля
Малогабаритный учебно-демонстрационный программно-аппаратный комплекс для отработки навыков в создании беспилотных автономных автомобилей.
Задача
Создание систем управления для беспилотных транспортных средств входит в число основных мероприятий дорожной карты «Автонет» Национальной технологической инициативы, реализующей государственную политику в области развития научно-технического потенциала страны. Одна из целей программы - увеличение доли отечественных производителей интеллектуальных транспортных систем управления для беспилотных автомобилей на российском рынке «Автонет» в размере 60% к 2035 году. Российские автомобильные концерны (КамАЗ, ГАЗ, АвтоВАЗ, УАЗ) уже несколько лет назад приступили к активным разработкам в области систем автономного движения.
Для работ такого масштаба и интенсивности требуются высококвалифицированные специалисты, и подготовка их в сжатые сроки также становится залогом реализации государственной политики.
Для обучения студентов технических вузов и повышения квалификации уже работающих сотрудников на полигоне-демонстраторе (TestBed) новых производственных технологий Центра НТИ СПбПУ было решено разработать учебно-демонстрационную платформу - модель беспилотного автомобиля, удовлетворяющую следующим требованиям:
- Наличие всех основных типов аппаратно-программных компонентов, используемых при проектировании реальных автономных транспортных систем;
- Использование передовых технологий технического зрения, машинного обучения, имитационного моделирования и др.;
- Модульность, которая позволит конфигурировать систему под различные задачи;
- Использование открытого ПО для свободы дальнейшей модификации устройства;
- Удобство в эксплуатации - возможность транспортировки и использования в ограниченном пространстве.
Проект выполняется совместно с Инжиниринговым центром «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ в рамках реализации образовательного направления программы Центра НТИ СПбПУ, а именно - развития полигона-демонстратора (TestBed) Центра НТИ СПбПУ и проведения на базе TestBed образовательных мероприятий для подготовки и повышения квалификации научных и инженерно-технических кадров, презентации передовых разработок и компетенций в сфере новых производственных технологий для представителей органов власти, промышленных предприятий, субъектов малого и среднего бизнеса.
Разработанная модель войдет в состав материально-технической части полигона, открытие которого запланировано на 2020 год.
Решение
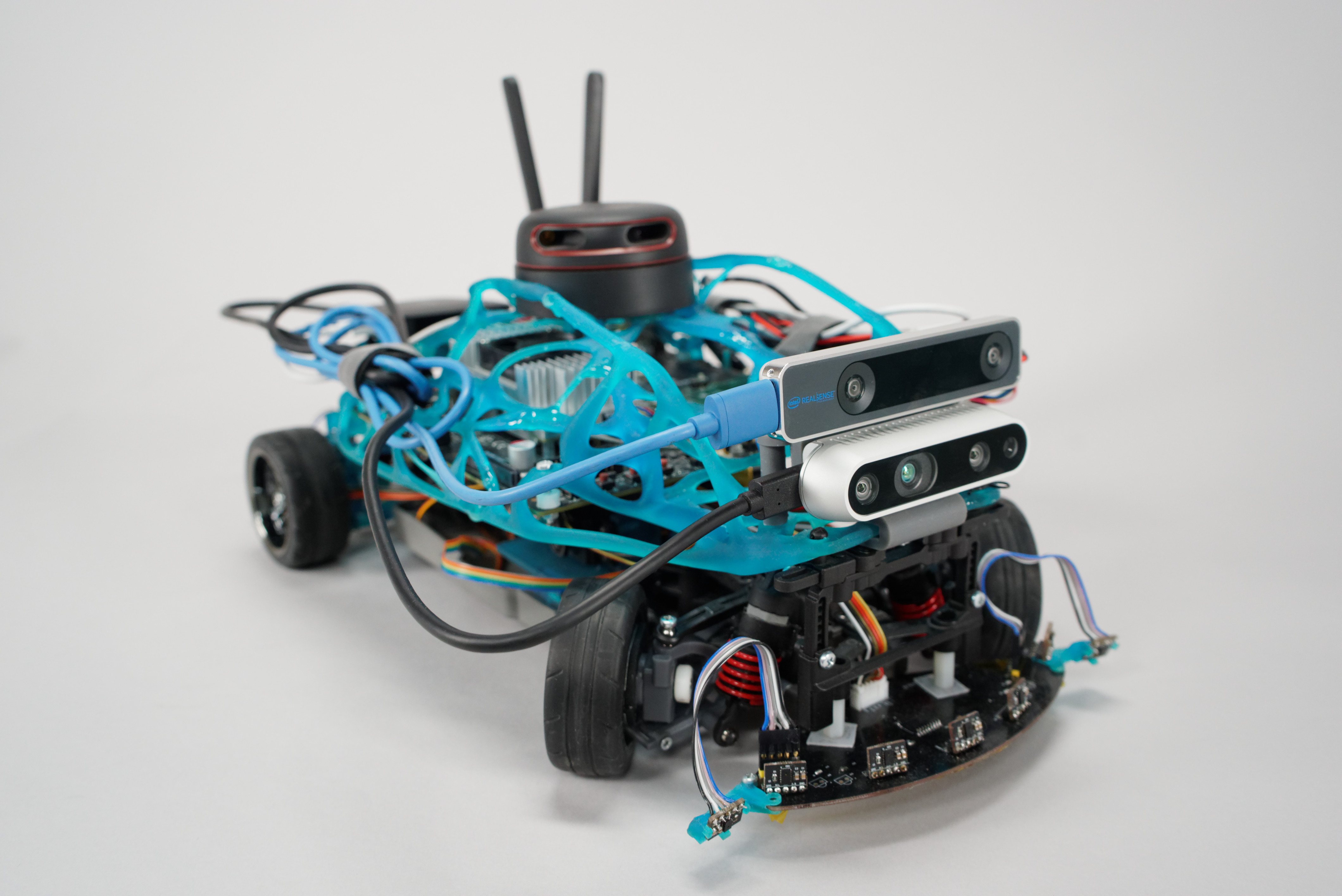
Программно-аппаратная платформа построена на базе микрокомпьютера NVidia Jetson TX2 и глубоко модифицированного шасси Traxxass 4-Tec 2.0.
В состав модели вошли:
- Стандартные датчики: энкодеры, 10 высокоточных датчиков дистанции, лидар, камера глубины, трекинг-камера, 4 промышленные видеокамеры;
- Платы управления аппаратной составляющей шасси (разработка лаборатории ПСПОД);
- Программное обеспечение для управления устройством на основе фреймворка ROS Melodic:
- блок построения карты (картографер),
- блок навигации,
- блок одометрии,
- блок управления движением,
- блок коммуникации
- блок интеграции с аппаратными средствами под управлением контроллера STM.
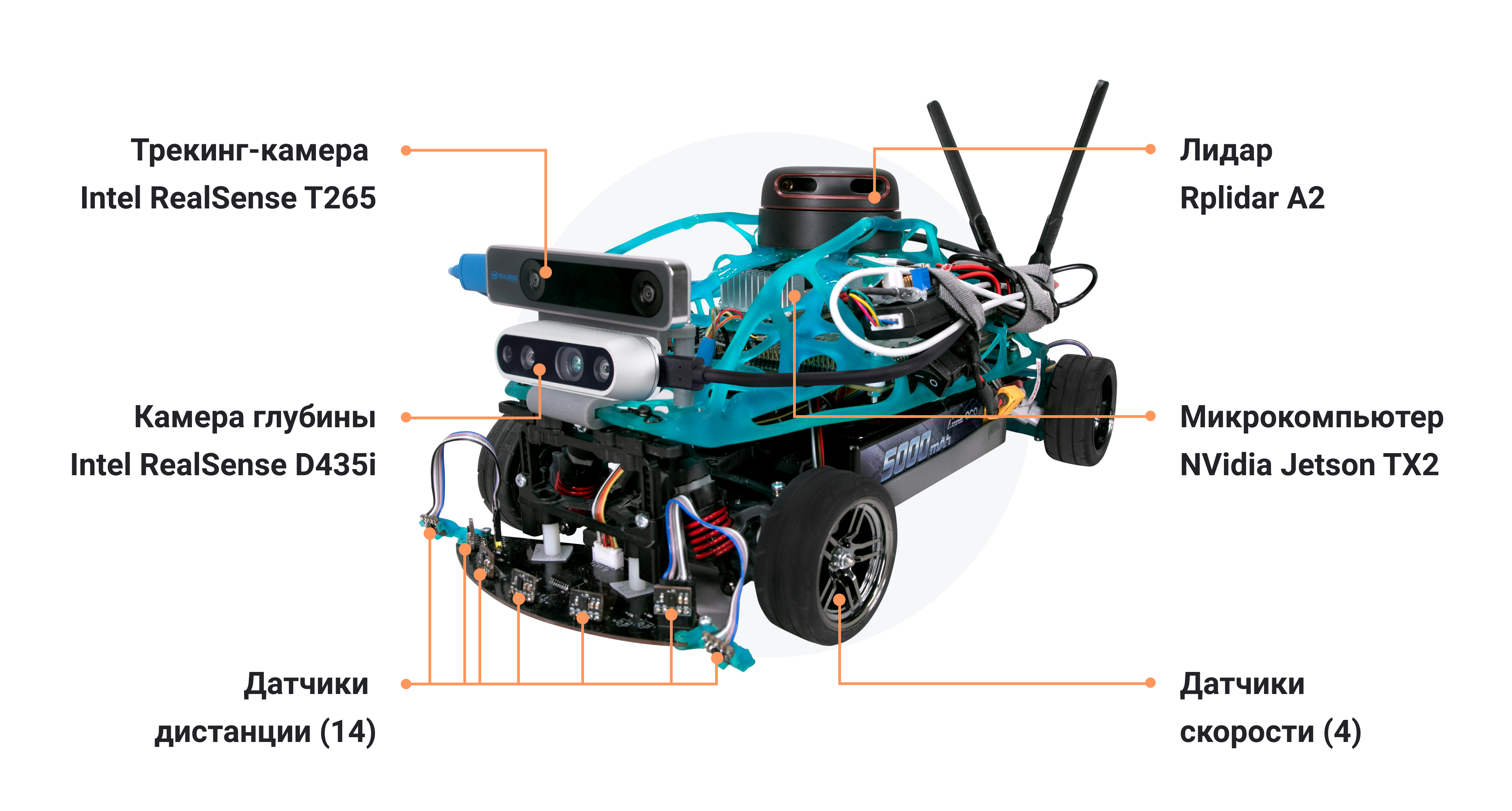
Компоненты модели
Программное обеспечение разработано в лаборатории ПСПОД на основе ПО из открытых источников.
В модулях ПО, осуществляющих сбор и анализ информации с датчиков, использованы:
- технологии технического зрения (сбор и объединение информации с камер);
- технологии машинного обучения (алгоритмы распознавания пешеходов);
- технологии искусственного интеллекта (расчет маршрута избегания динамических объектов/обхода препятствий в интеллектуальной системе управления).
Также была разработана виртуальная модель для симуляции функционирования, которая позволяет проводить отладку программного обеспечения без физической модели, что существенно ускоряет процесс разработки.
Инжиниринговый центр «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ выполнил доработку шасси для уменьшения радиуса разворота и разработал новую несущую конструкцию (деку) для оборудования при помощи современных технологий компьютерного моделирования и проектирования по принципам бионического дизайна.
Благодаря перечисленному набору компонентов устройство позволяет:
- Строить карты местности и ориентироваться на них (например, при помощи SLAM-метода или при помощи считывания одометрии);
- Выполнять поиск кратчайшего пути следования к точке на карте;
- Объезжать динамические препятствия;
- Распознавать различные знаки и атрибуты дорожной обстановки – разметку, дорожные знаки, пешеходов, другой транспорт – и реагировать на них;
- Строить обзорные изображения (surround view, bird view, orbital view и прочие) и др.
Преимущества решения
- Уникальность. По исследованиям, проведенным разработчиками лаборатории ПСПОД перед началом работы, аналогов учебно-демонстрационного комплекса такого уровня не существует;
- Эффективность: в одном устройстве собран весь арсенал технологий, используемых в настоящее время конструкторами для построения систем ADAS (Advanced Driver Assistance System);
- Актуальность: представленные программно-аппаратные решения соответствуют передовым разработкам в данной отрасли;
- Доступность: платформа легка в транспортировке и может использоваться в обычной учебной аудитории благодаря небольшим габаритам (40х25см) и маленькому радиусу разворота (менее 40 см);
- Платформа дает возможность более общего изучения технологий сбора, обработки и передачи информации от различного рода датчиков для создания информационных систем другого рода.
Детали
Этапы проекта:
- Разработка тестового образца с ограниченной функциональностью (январь 2020).
- Разработка опытного образца с возможностями построения карт местности, навигации, ориентации и обхода препятствий (2020).
- Разработка коммерческого образца, реализация ADAS (2020 - 2021).
На текущий момент завершены работы 2-го этапа.
На 1 этапе разработки решены задачи:
- Отработка аппаратных решений для обеспечения задач управления составными частями ММАА (двигатель, сервоприводы поворота колёс, датчики скорости движения, датчики приближения, камеры и т.д.);
- Обеспечение взаимодействия составных частей ММАА;
- Отработка задач обнаружения пешеходов по информации с камер кругового обзора;
- Автоматическая остановка при обнаружении препятствий и/или пешеходов, представляющих опасность для дальнейшего передвижения ММАА;
- Взаимодействие с Web-интерфейсом полигона-демонстратора и передача в режиме реального времени запрашиваемой информации: скорость движения, угол поворота колёс, расстояния до каждого из датчиков приближения, а также видеоизображение с 4 камер кругового обзора с обнаружением на них пешеходов;
- Движение при помощи пульта дистанционного управления.
Так как обеспечение автономного движения автомобиля является совокупностью решений множества различных задач, на 2 этапе работ были расширены и углублены возможности модели в областях ориентации в пространстве, построения карт местности, навигации в пространстве, а также взаимодействия с трекинг-камерами и камерами глубины.
- Разработка программно-аппаратных компонентов построения карт местности, навигации, ориентации и обхода препятствий
Одной из важнейших частей разработки программно-аппаратного обеспечения стало описание модели робота в формате Unified Robot Description Format (URDF). URDF файл необходим для симуляции поведения модели в виртуальной среде, а также используется для визуализации результатов алгоритмов.
В качестве физического симулятора был выбран Gazebo. Для симуляции лидара, камер и датчиков расстояния были созданы виртуальные модели, дублирующие их физические свойства.
Для тестирования алгоритмов SLAM (simultaneous localization and mapping — одновременная локализация и построение карты) и навигации были созданы несколько виртуальных пространств с препятствиями различной конфигурации.
В процессе разработки была описана виртуальная модель, включающая в себя:
- 4 колеса;
- Шасси;
- Плату;
- Трекинг-камеру (Intel realsense t265);
- Камеру глубины (Intel realsense d435i);
- Лидар (Rplidar A2);
- Inertial Measurement Units (IMU) (Intel realsense t265);
- 10 датчиков расстояния.
Описаны размеры и различные физические свойства компонентов, таких как масса, инерция и т.д., для корректной физической симуляции модели в виртуальной среде. Описание также содержит данные о реальных расположениях и трансформациях (повороте) компонентов, при помощи которых строится дерево трансформации модели.
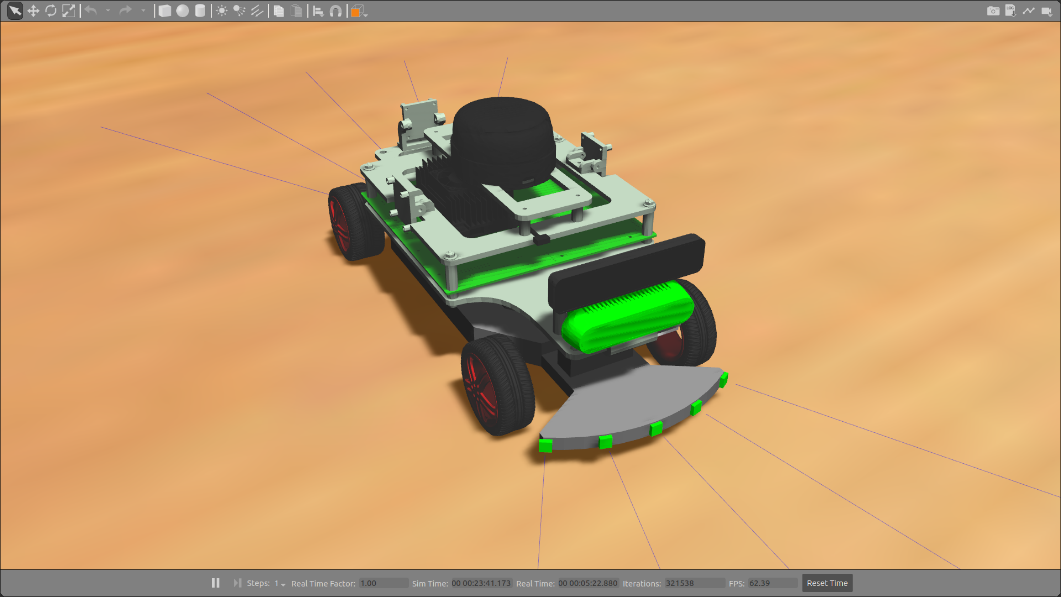
Виртуальная модель в симуляторе Gazebo
На симуляторе были проведены предварительные испытания. Модель, передвигаясь и ориентируясь в предложенном пространстве, должна была отправлять для отображения в визуальный интерфейс свой путь, информацию о своей скорости, углах поворота колёс, расстояниях до датчиков дистанции, текущую карту местности, текущий путь перемещения и текущую цель передвижения.

Исходная карта местности в симуляторе Gazebo, имитирующая физическую среду с препятствиями для прохождения модели.
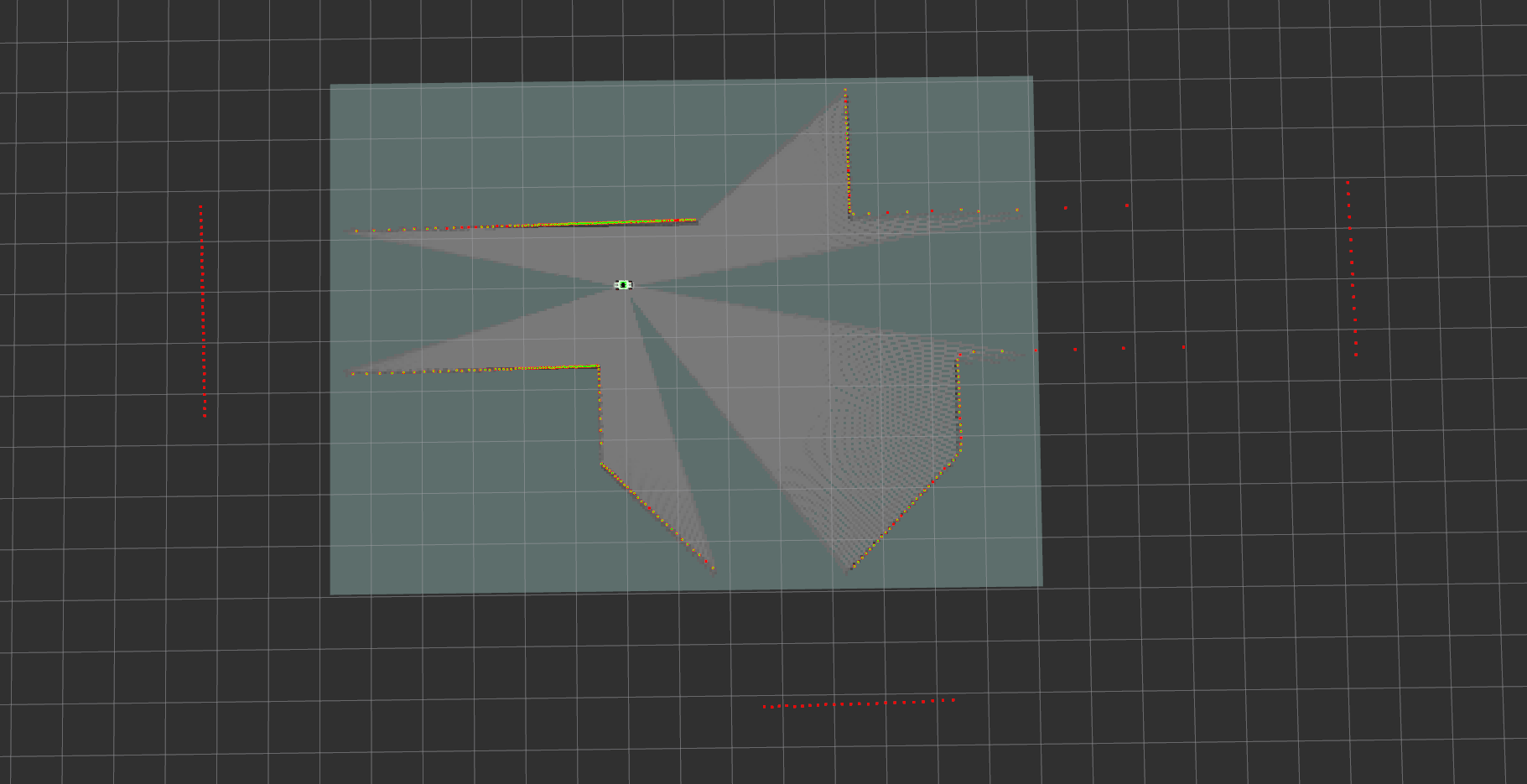
Карта местности, созданная моделью с помощью данных лидара после включения, до начала движения.
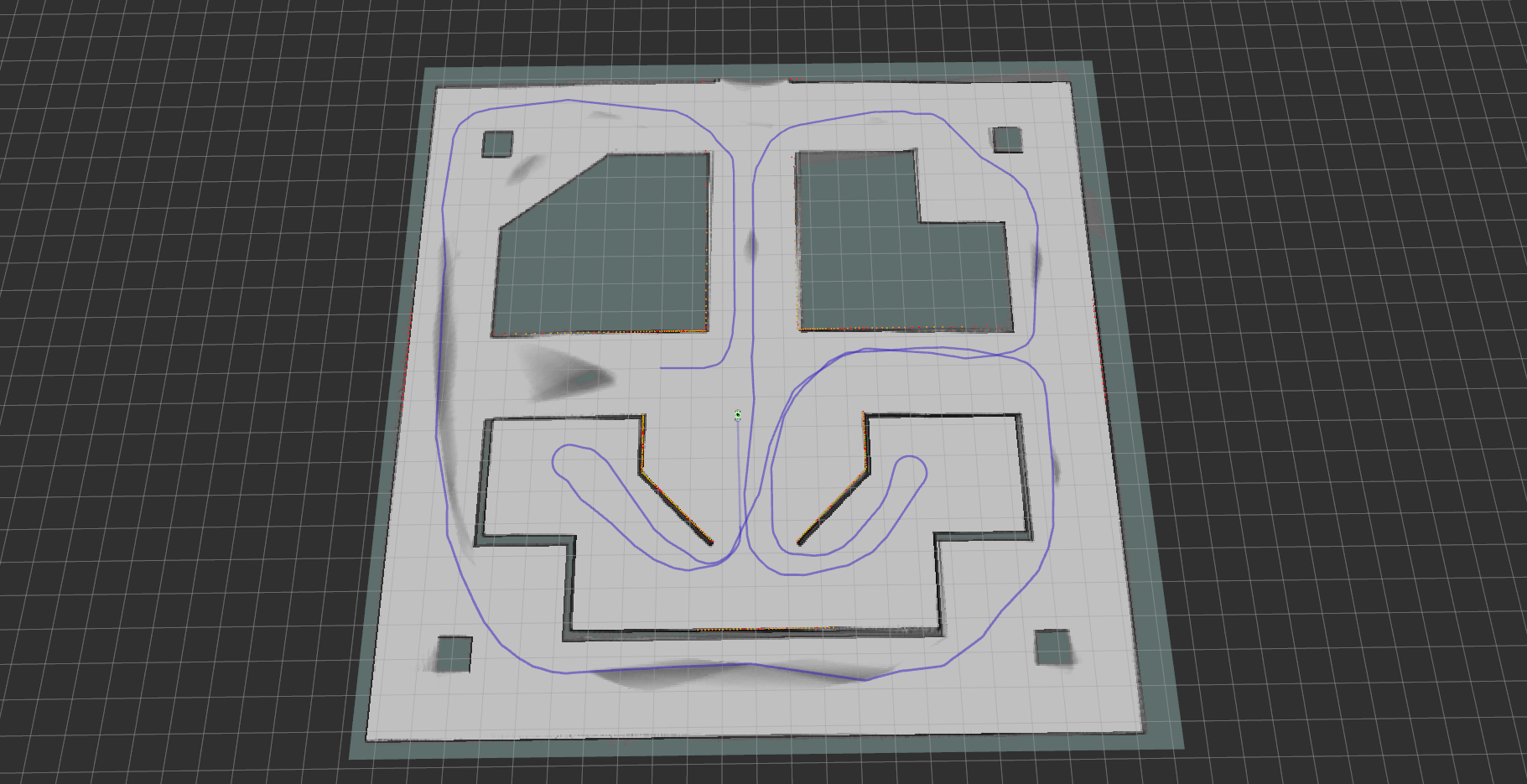
Карта местности, построенная моделью с помощью данных лидара и блока построения карты (картографера) после прохождения пути.
Испытания виртуальной модели платформы показали, что программное обеспечение соответствующих блоков полностью выполняет поставленные задачи и работает по плану.
В рамках 2 этапа работ произведена разработка и интеграция web-интерфейса для управления/отображения информации и окончательная настройка системы.
2. Доработка конструкции физической модели
С целью улучшения технических характеристик платформы было решено доработать конструкцию шасси модели в сотрудничестве со специалистами Инжинирингового центра «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ.
Сотрудниками Инжинирингового центра были сделаны расчёты текущего исполнения шасси, при котором диаметр разворота будет меньше 80 см. Для этого переработан рулевой механизм передней оси (поворотные кулаки, тяги, рычаги), благодаря чему угол поворота передних колёс увеличился с 30 до 45 градусов, а также изменена задняя подвеска, благодаря чему задняя ось тоже стала управляемой с углом поворота 20 градусов и отдельным сервоприводом.
Таким образом, не только уменьшился радиус разворота модели, но и увеличилась гибкость в управлении платформой, так как на больших скоростях движения можно использовать поворот только передней оси, тем самым увеличивая устойчивость, а на малых скоростях подключать к управлению заднюю ось для улучшения манёвренности.
Сотрудниками Инжинирингового центра также разработана и смонтирована дека, спроектированная с применением подходов бионического дизайна.
Технические преимущества (на текущем этапе):
- Использование ROS – открытого фреймворка для создания своих модулей для ММАА;
- Гибкость используемых наборов датчиков;
- Построение карты местности, навигация, объезд препятствий в режиме реального времени;
- Малые габариты, малый радиус разворота.
Технологии
| Языки программирования и фреймворки | C++, Python, Kotlin, ROS, Cartographer, C, CubeMx |
| OS | Linux, Android |
| CVS | Git (Gitlab) |
| IDE | CLion, stm32cubeide, vscode |
РИД
Публикации
Ключевые исполнители
- Руководитель проекта: М.В. Болсуновская, заведующий лабораторией «Промышленные системы потоковой обработки данных» Центра НТИ СПбПУ
- Менеджер проекта, руководитель группы аппаратной разработки: Г.С. Васильянов
- Руководитель группы программной разработки С. Таммсаар
Соисполнитель
Инжиниринговый центр «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ
Заказчик
- Центр НТИ СПбПУ
- Руководитель внедрения на полигоне-демонстраторе (TestBed) новых производственных технологий Центра НТИ СПбПУ - Д.А. Гаранин, руководитель проекта TestBed, заведующий научной лабораторией «Стратегическое развитие рынков инжиниринга» Центра НТИ СПбПУ.
Дополнительные материалы

Вебинар для ММСО-2020
Смотреть запись