Algorithms and software for processing and visualization of laser scanning data
Software package for visualization and parallel processing of super-large clouds of laser scanning points in the conditions of RAM limitations.
Task
Laser scanning is a modern and rapidly developing type of remote sensing, the result of which is a point cloud. The main applications of laser scanning are:
- Topographic survey: territorial plans
- Architecture three-dimensional models
- Engineering survey
- Augmented reality application development
- Monitoring:
- Digital city
- Industry - production facilities, communications
- Construction - conformity control of working documentation.
The main feature of laser scanning is high accuracy and density of measurements. In addition, laser scanning has an advantage over classical measurement technologies (geodesy, aerial photography, etc.) in terms of the cost of shooting and modeling, data processing speed, aggregate accuracy, and work requirements.
One of the problems of laser scanning is the volume of measurements: often the scan results can be calculated in hundreds of gigabytes and contain billions of points. Downloading and processing such large amounts of data requires a lot of time and processing power.
The task of the developers in this project was the development of algorithms that allow the processing and visualization of super-large clouds of laser scanning points in the conditions of RAM limitations.
Solution
During the project, several experimental samples of software components (ES SC) were developed:
- ES SC create raster projections.
- ES SC decryption and vectorization.
- ES SC visualization.
The designed ES SC for raster projection is intended to obtain cuts, sections, and orthophotos of objects based on laser scanning and photographing data in the format of point models.
The developed EO PC decryption and vectorization is intended for contrasting, filtering, classification and vector processing of points in the format of point models.
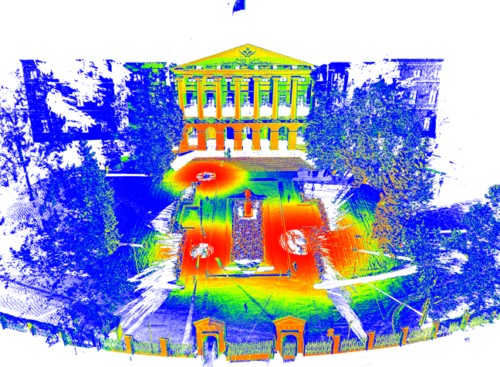
The developed visualization PC EO is designed to display ultra-large clouds of laser scanning points under conditions of RAM limitations.
Solution advantages
- Reduced load time and pre-processing point cloud:
- 5 sec to load 50 million points (up to 50 seconds for analogues).
- 7 sec for loading 250 million points (up to 4.1 minutes for analogues).
- 3 minutes to load 1.5 billion points (up to 24.5 minutes for analogues).
- Reduced RAM consumption on large point clouds:
- 2 GB for 50 million points (up to 2.4 GB for analogues).
- 2 GB for 250 million points (up to 12 GB with analogues).
- 4 GB for 1.5 billion points (up to 75 GB for analogues).
Details
The solution consists of four key modules:
- EO PC create raster projections
- EO PC decryption and vectorization
- EO PC visualization
- EO PC hybrid processing.
Key features:
- Obtaining cuts, sections and orthophotos of objects based on laser scanning and photographing in the format of point models
- Performing orthographic transformations of the laser scan data
- Formation of flat and cylindrical projections according to the laser scanning
- Creation of a 3d model according to the laser scanning data
- Closing surface defects of a 3d model
- Coordinate transformations
- Point cloud density calculation
- Point cloud contrast
- Point cloud ranking
- Point cloud filtering
- Point cloud vector processing
- Calculation of the surface of clean land
- Calculation of horizontal contours
- Calculation of relief profiles
- Assessment of changes in objects and local landscapes.
Technical advantages:
- Use of SSE / AVX technologies
- Parallel data processing
- Cross-platform operation
- Two-level point cloud caching system
- Point cloud processing line
- Visualization of very large point clouds.
Technologies
| Software programming languages and frameworks | C++, Qt |
| OS | Windows, Linux |
| Architectures | x64 |
| CVS | Git (GitLab) |
| Others | SSE/AVX, parallel processing, spatial partitioning |
Intellectual Property
Publications
The project is supported by the BRICS Framework Network for Science and Innovation with the financial support of the Ministry of Science and Higher Education of the Russian Federation in the framework of the Federal Target Program "Research and Development in Priority Spheres for the Development of the Scientific and Technological Complex of Russia for 2014-2020."
Agreement on the provision of subsidies between the Federal State Autonomous Educational Institution of Higher Education “SPbPU” and the Ministry of Science and Higher Education of the Russian Federation dated 03.10.2017 No. 14.584.21.0025.
Unique identifier: RFMEFI58417X0025.Project team
- Development team leader: S. Tammsaar
- Programmer-developer: K. Belyaevsky
Индустриальные партнёры
- Industrial partner: Ekoscan LLC
- Foreign partners: Indian Institute of Technology Roorkee and East China Normal University