Software for photo and video recording of violations of the road regulations
Software for the measuring complex with the functions of traffic control and photo capture of road users moving through a controlled section of an unregulated street intersection with synchronous fixing of the time of taking photo, speed and location in the control zone.
Task
Modern developments in the field of automation of the transport system are mainly aimed at ensuring the safety of road users, especially pedestrians, as the largest and most vulnerable group. Basically, the development is aimed at monitoring compliance with the rules, which are now being carried out using automatic photo and video fixation: radar, laser, photo and video cameras.
One of the leading manufacturers of technical equipment for these purposes turned to laboratory specialists with the task of developing software for a stationary measuring system for fixing violations of traffic rules by drivers.
The software designed to control the situation at unregulated pedestrian crossings had to independently determine cases of offenses, as well as:
- Carry out photo and video recording of road users crossing a controlled section of the road
- Synchronously register and record the time of photographing
- Synchronously register and record the speed of vehicles and pedestrians, as well as their location in the control zone
- Form the necessary evidence base on vehicle offenses.
Solution
Software has been developed with the help of which the measuring complex records the following events in the control area:
- Failure to provide the priority of pedestrians
- U-Turn at a crosswalk
- Overspeeding
- Driving on a roadside
- Driving on the dedicated bus-only lane
- Driving on the wrong side
- Crossing into oncoming tram lane
- Oncoming traffic on a one-way road
- Driving without any administrative offense.
Advantages:
- Reliable evidence base: in case of detection of an offense, the system generates a protocol: a photo collage and video recordings indicating the trajectory of the vehicle, vehicle speed and time of the offense.
- Customization of templates: the type and composition of information can be customized depending on the tasks of monitoring.
- Automatic mode: materials are formed without cameraman’s intervention; the need for manual rejection of frames is eliminated.
- Real-time broadcast.
- Possibility of remote monitoring using Zabbix and SNMP protocols.
- Search for vehicles on the want list among all recorded driveways according to the given parameters.
- Video signal processing for recognition of pedestrians and license plates: the use of video signal preprocessing algorithms and image post-processing algorithms to improve the quality of photo materials.
Details
As part of the creation of the software, the following work was carried out:
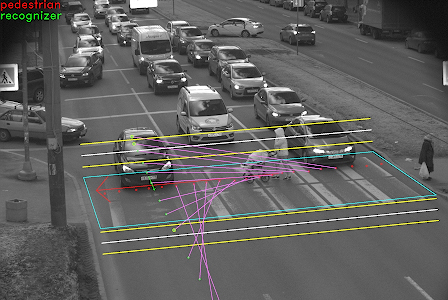
- Development of an algorithm for detecting pedestrians and vehicles and plotting the trajectory of their movement.
- Development of an algorithm for recognizing violations in accordance with GOST R 57144-216.
- Development of a simulation machine and verification in accordance with the verification methodology.
- Development of backup archiving algorithms for delinquency data.
- Development of algorithms for determining the measuring complex location parameters on the ground on the basis of camera images and radar data.
- Development of an application for viewing the data of redundant documentation generated by the measuring complex.
Algorithms for detecting the following types of traffic violations have been implemented:
- Article 12.9. of the AOC RF. Exceeding the established speed limit.
- Article 12.14. of the AOC RF. Violation of the rules for maneuvering (U-turn at a pedestrian crossing).
- Article 12.15. of the AOC RF. Violation of the rules of the vehicle on the roadway, passing of oncoming traffic or overtaking:
- Part 1. Flank traffic,
- Part 3. Wrong-way driving. Crossing into oncoming tram lane.
- Article 12.16 of the AOC RF. Failure to comply with the requirements prescribed by traffic signs or road marking: Part 3. Wrong-way driving.
- Article 12.17 of the AOC RF. Failure yield in moving to a route vehicle or vehicle with special light and sound signals activated: Part 1.1. Traffic of vehicles in the dedicated bus-only lane.
- Article 12.18 of the AOC RF. Failure yield to pedestrians.
At the moment, the software is installed and successfully works in the measuring complexes of the customer company.
Characteristics of the measuring complex:
- GOST R 57144-2016, GOST R 57145-2016.
- Metrological confirmation of the measured parameters
- Possibility of installation on existing road infrastructure facilities.
- Measuring range of vehicle speed from 2 to 350 km/h
- Measuring area from - to a moving vehicle: 10 - 100 m
- Measuring range of vehicle angles: from + 20 ° to -20°
- The working frequency of radar emission is 24.15 ± 0.1 GHz
Conditions of service:
- Background temperature from -40 to + 50ºС.
- Environmental relative humidity up to 98%.
- Protection class in accordance with GOST 14254-2015 - IP65.
Technical advantages:
- Measurement of vehicle speed in the range from 2 to 250 km/h with an error of no more than +/- 2 km/h for the speeds up to 100 km/h and no more than +/- 2% for the speeds above 100 km/h.
- Determining the time of the event and assigning it to the material with an accuracy of no more than +/- 3 ms
- Vehicles and pedestrians trajectory analysis
- Complete control of up to three lanes with photographic fixation of all vehicles.
Technologies
| Libraries and frameworks | Qt, OpenCV, Boost, Zlib, Live555, ffmpeg, libx264, libjpeg |
| Web interface | Javascript/AJAX/JQuery, Bootstrap, WebSockets, HTML5, CSS |
| OS | Windows embedded |
| Architectures | x64 |
| CVS | Git (Gitlab) |
| DBMS/DB | MySQL |
| Wireless technologies | Wi-Fi |
Intellectual Property
Publications
Project team
- Development team leader: A. Odoevsky
- System architect: D. Barinov
- Lead developer: N. Abramov
- Mathematician algorithm: Y. Khutornoy
- Developers: O. Kozyrev, A. Belyaevsky, M. Barinov