Система датчиков для экологического и санитарно-эпидемиологического мониторинга
Система датчиков для экологического и санитарно-эпидемиологического мониторинга на базе передвижной автономной платформы.
Задача
Мониторинг показателей окружающей среды с помощью автономных устройств – одно из наиболее бурно развивающихся технологических направлений. Роботы, оснащенные системами автономного управления, датчиками и системами IoT, используются не только в опасных или удаленных зонах, но и для более простых задач – например, для задач охраны труда на предприятиях, где требуется поддержание микроклимата рабочего места в пределах допустимых норм. Особенно это актуально для объектов, где возможно распространение газов и веществ, опасных для здоровья и жизни людей.
Для ручного сбора данных о параметрах среды на промышленном предприятии сотрудник вынужден передвигаться по объекту с большим набором оборудования и производить замеры в определенных точках. При этом продолжительность его рабочего дня ограничена, нельзя исключить и возможность ошибки.
Для автоматизации и улучшения качества мониторинга было разработано малогабаритное автономное транспортное средство, которое производит замеры микроклимата автоматически, с необходимой частотой, без ограничений по продолжительности рабочего дня и может самостоятельно перемещаться по различным зонам помещения, в том числе и труднодоступным.
Созданный программно-аппаратный комплекс позволяет получать более высокую детализацию данных по экологическому мониторингу производственных зон по сравнению с ручным мониторингом или фиксированными датчиками, установленными в определенных местах. Количество точек измерения микроклимата, необходимых для проведения контроля, выше на 10 % по сравнению со стандартными методами.
Решение
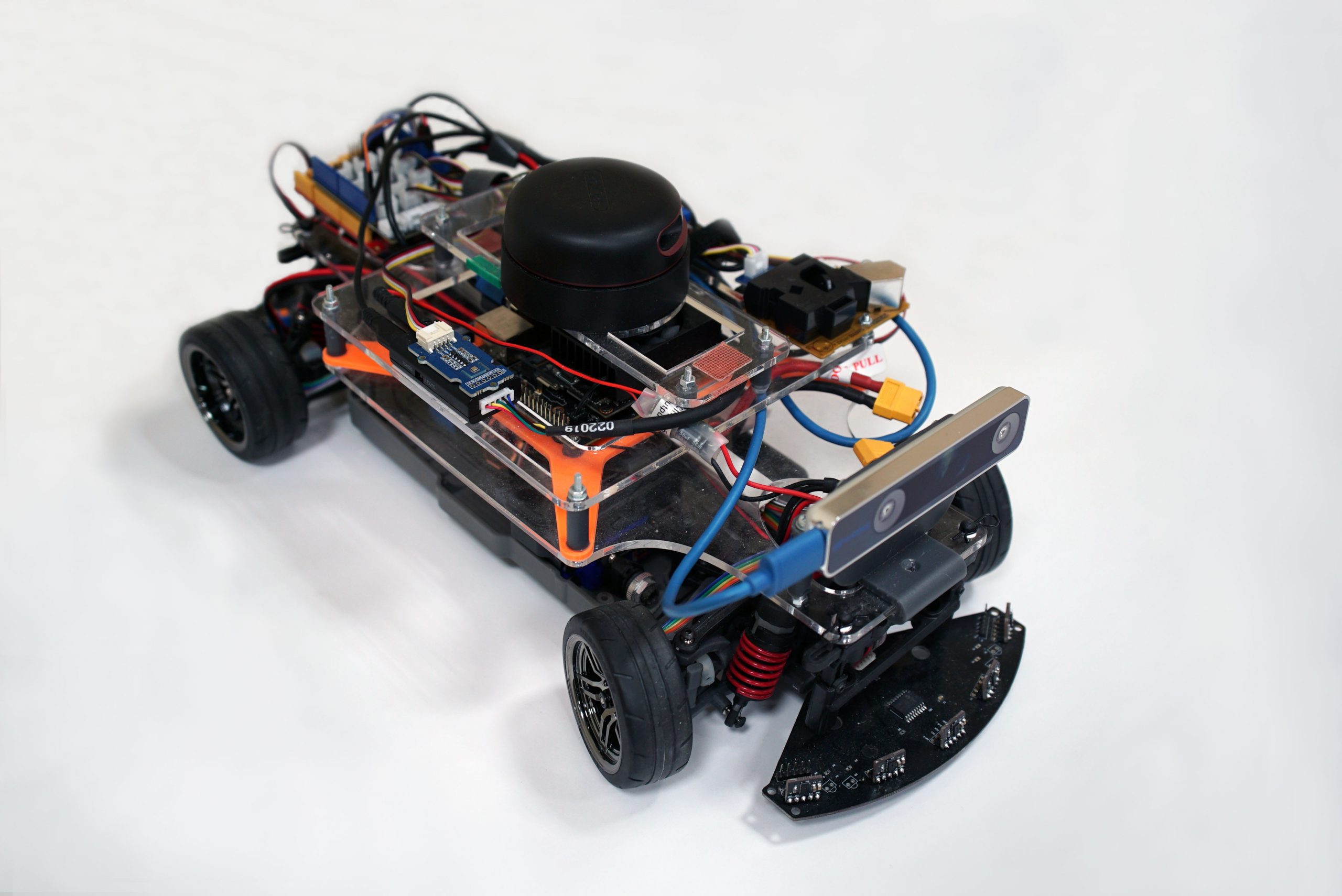
Разработано малогабаритное автономное устройство, которое передвигается по производственным площадям размером до 300 м2 и в автоматическом режиме делает замеры с помощью своих датчиков микроклимата. Маршрут устройства можно задать, чтобы снять показатели датчиков в строго определенных точках помещения.

Платформа может свободно передвигаться даже в небольших помещениях, так как ее размер составляет 40×25 см, а радиус разворота менее 60 см. Беспилотное устройство строит 2D-карту помещения с помощью лидара, стереокамеры, датчиков дистанции и датчиков одометрии, а другой набор датчиков снимает показатели температуры, влажности, барометрического давления, уровня шума, освещенности, запыленности и концентрации опасных газов.
Данные с датчиков сохраняются и обрабатываются в памяти устройства.
По завершении маршрута показания датчиков, связанные с координатами точки, в которой проводились замеры, могут быть выгружены из памяти устройства в виде CSV-таблицы и отдельного файла карты помещения. Совместив табличные данные с картой помещения, можно составить точное представление о санитарно-эпидемиологической обстановке на исследованной территории. Эти данные могут быть использованы как для поиска различных источников опасности, так и для корректировки условий пребывания людей в определенной зоне.
1. Датчики, необходимые для обеспечения автономного передвижения.Позволяют модели успешно строить двумерные карты местности и выполнять ориентацию в пространстве как на незнакомых картах, так и на уже построенных.
- Инфракрасные датчики дистанции, по 5 штук на передней и задней части; при необходимости можно установить по 7,
- Однолучевой лидар,
- Visual-SLAM камера в передней части,
- Датчики скорости на каждом из колёс.
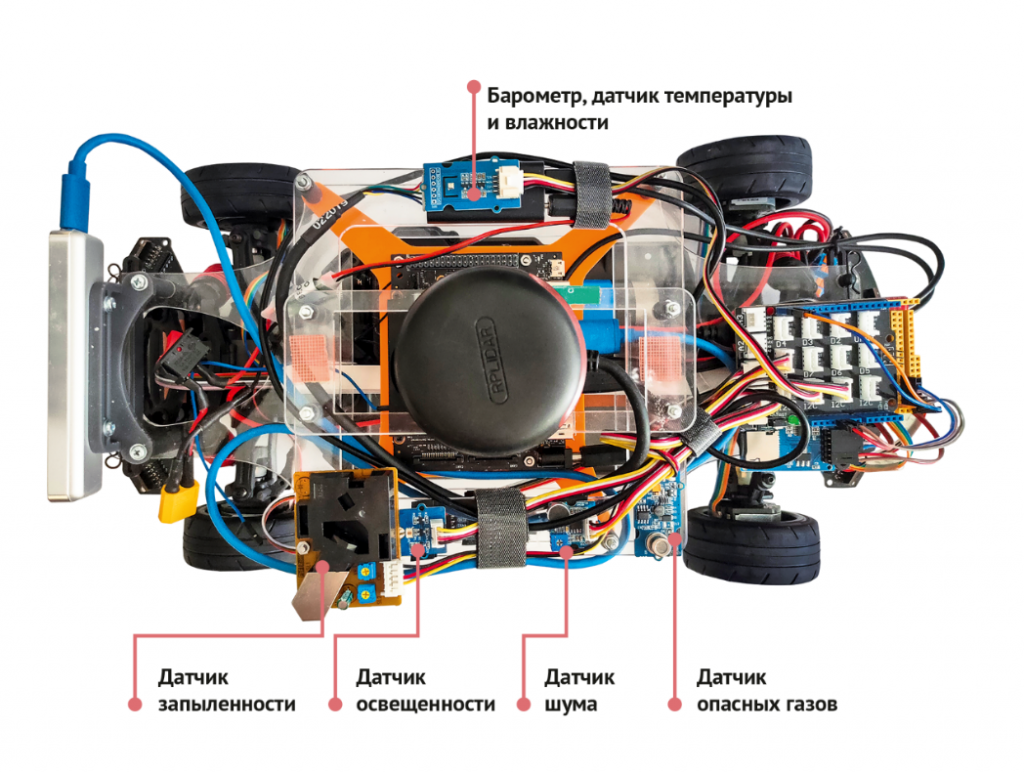
2. Датчики для экологического и санитарно-эпидемиологического мониторинга.
- Температуры,
- Влажности,
- Барометрического давления,
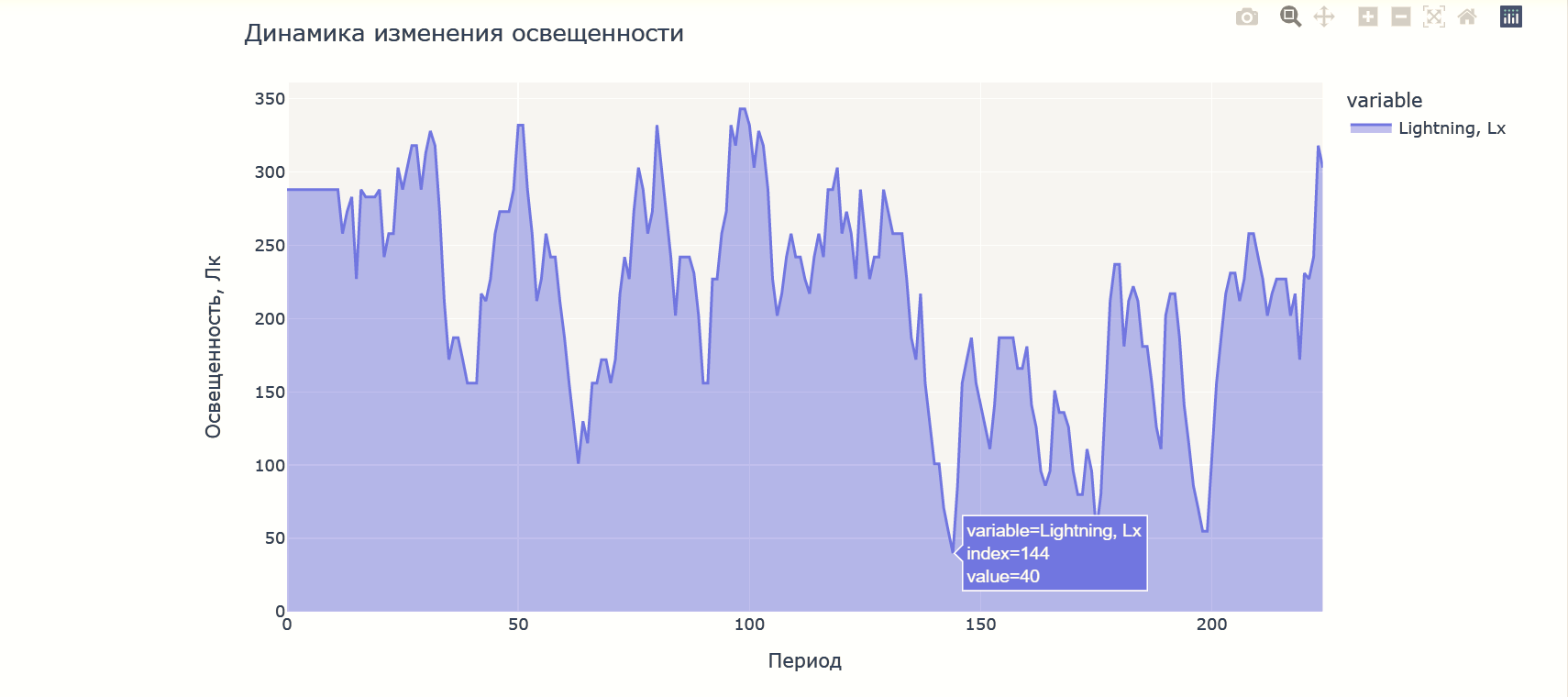
- Освещенности,
- Запылённости,
- Уровня шума,
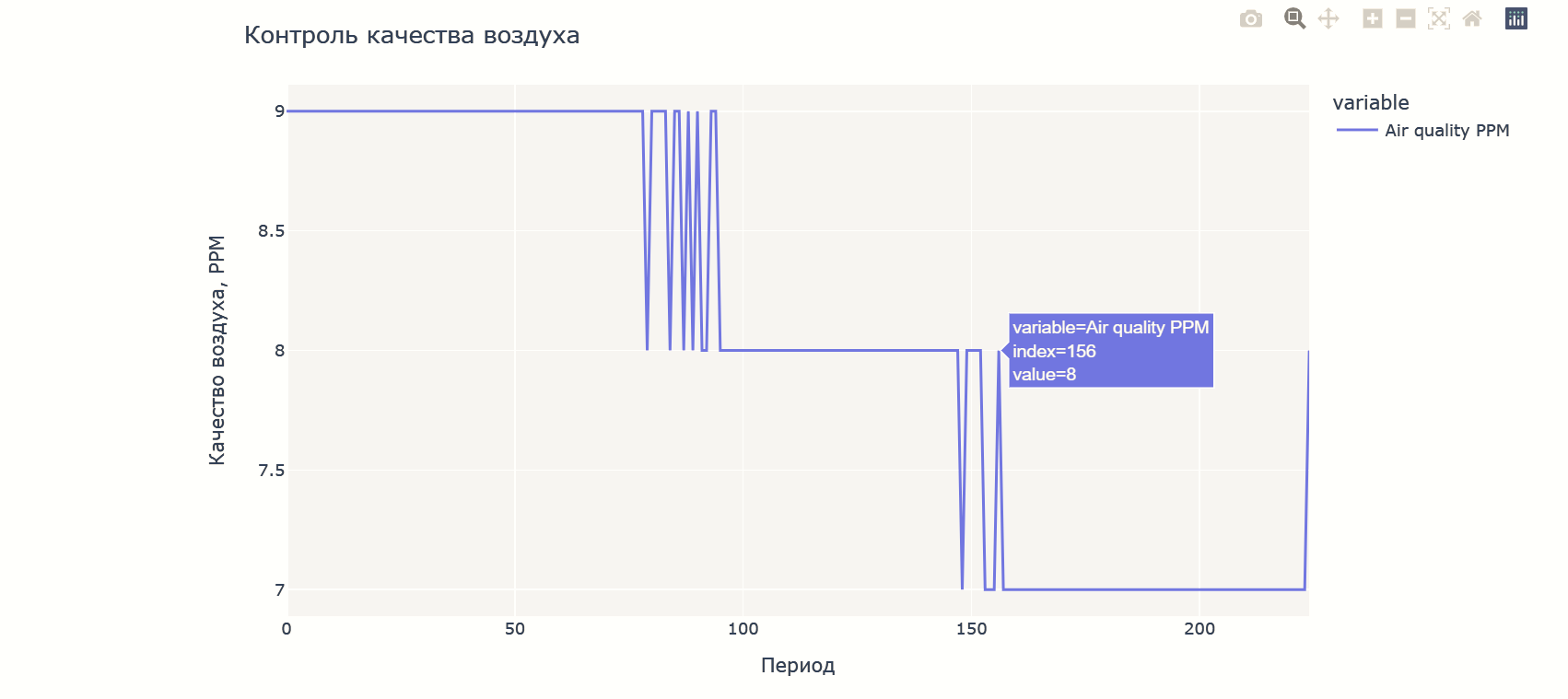
- Концентрации опасных газов.

Число и состав датчиков контроля микроклимата при необходимости могут быть существенно расширены. Данные с них объединяются на борту прототипа с его относительными координатами и могут быть использованы для выявления проблем в определенных зонах при мониторинге помещений.
ПО модели, с помощью которого она движется и снимает данные, разработано на базе ROS (Robot Operating System), то есть по модульному принципу, поэтому его можно свободно расширять, модернизировать и кастомизировать под актуальные для заказчика задачи.
В режиме сканирования устройство может работать до 3 часов, а в режиме ожидания - до 10. В качестве элементов питания используются обычные литий-полимерные аккумуляторы.
Детали
Область использования
Прототип в текущей версии предназначен для работы внутри закрытых помещений площадью до 300м2. Отсутствие Wi-Fi не является ограничением для функционирования автомобиля, но сеть необходима для контроля работы устройства и получения обратной связи. Для успешной работы модели пространство должно быть замкнутым, без зеркальных и прозрачных поверхностей на высотах ниже 25 см от уровня пола, а также без препятствий меньше 50*50мм и ниже 35мм. Максимальный угол подъёма – 5 градусов. Максимальный преодолеваемый порог – 7,5мм в текущем исполнении - может быть увеличен за счёт подъёма подвески и установки бóльших по диаметру колёс или других амортизаторов.
Шасси
Для основы двигающейся части прототипа было взято стандартное шасси радиоуправляемой модели. В процессе разработки оно было серьезно модернизировано для улучшения маневренности и уменьшения люфтов в отдельных узлах конструкции шасси.
Данные габаритные размеры являются наиболее универсальными. С одной стороны, они позволяют разместить «на борту» модели весь набор оборудования, которое необходимо для выполнения поставленных задач. С другой стороны, небольшие габариты позволяют легко транспортировать прототип и эксплуатировать его в типовых замкнутых пространствах – небольших комнатах, коридорах и так далее.
Технологии
| Языки программирования и фреймворки: | C++, Python, ROS, Cartographer, C, CubeMx |
| OS: | Linux |
| CVS: | Git (Gitlab) |
| IDE: | CLion, stm32cubeide, vscode |
РИД
Ключевые исполнители
- Руководитель проекта: Д.Г. Родионов, директор Высшей инженерно-экономической школы Института промышленного менеджмента, экономики и торговли СПбПУ
- Руководитель группы аппаратно-программной разработки: Г.С. Васильянов, научный сотрудник Лаборатории «Цифровое моделирование индустриальных систем» Центра НТИ СПбПУ
Исполнители
- Высшая инженерно-экономическая школа Института промышленного менеджмента, экономики и торговли СПбПУ
- Лаборатория «Цифровое моделирование индустриальных систем» Центра НТИ СПбПУ
- Лаборатория «Промышленные системы потоковой обработки данных» Центра НТИ СПбПУ