Малогабаритный колесный автономный робот (МКАР). Версия 3.1
Практический образовательный комплекс, направленный на изучение робототехники, программирования и принципов работы беспилотных систем
Задача
Развитие инженерного мышления, цифровой грамотности и навыков практического программирования становится одной из ключевых целей современного образования. В условиях стремительного развития технологий и появления новых отраслей – таких как беспилотный транспорт, киберфизические системы и умные города – необходимо не только информировать школьников о существующих профессиях, но и давать им возможность уже в процессе обучения осваивать реальные инструменты, применяемые в индустрии.
Проект МКАР 3.1 направлен на решение сразу нескольких задач в области инженерного и технологического образования:
- Формирование инженерных компетенций с раннего возраста
Школьники получают доступ к современным технологиям – от микроконтроллеров до операционных систем реального времени и робототехнических фреймворков (ROS2). Работа с такими инструментами позволяет им не только освоить базовые принципы робототехники, но и на практике применить знания в области физики, математики и информатики.
- Интеграция цифровых и инженерных практик в школьную образовательную среду
МКАР 3.1 адаптирован под работу в общеобразовательных школах, лицеях и технических кружках. Он позволяет встроить практическое обучение в существующие учебные планы, поддерживает формат проектной деятельности, а также подходит для подготовки к олимпиадам и конкурсам технической направленности.
- Снижение барьера входа в робототехнику
Проект учитывает различный уровень подготовки учащихся. Благодаря виртуальной среде симуляции, ученики могут начинать с работы в цифровом пространстве, не рискуя повредить физическое устройство. Это особенно важно для начального уровня и удалённого обучения. Далее, по мере роста компетенций, они переходят к программированию и управлению реальным устройством.
- Развитие навыков командной работы и системного мышления
Работа с МКАР требует распределения ролей: кто-то занимается сборкой, кто-то – программированием, кто-то – проектированием алгоритмов. Это естественным образом формирует командную работу и понимание комплексных инженерных систем как набора взаимосвязанных компонентов.
- Ранняя профориентация и подготовка к технологическим профессиям
Посредством практики с МКАР школьники знакомятся с профессиями в сферах программирования, мехатроники, электроники, автоматизации и анализа данных. Это позволяет учащимся осознанно выбирать дальнейшую образовательную траекторию и готовиться к поступлению в вузы инженерной направленности.
- Унификация инженерного образования в системе «школа – вуз – индустрия»
Проект служит связующим звеном между общеобразовательной школой, техническим вузом и индустриальной средой. Использование промышленных стандартов (например, ROS2, Gazebo, Git) позволяет ученикам уже на школьном этапе познакомиться с технологиями, применяемыми в современной инженерной практике, и формировать непрерывную траекторию профессионального роста.
Решение
Проект МКАР 3.1 предлагает комплексное инженерно-образовательное решение, сочетающее современные аппаратные и программные компоненты с методически выверенным учебным контентом. Он создан как инструмент для погружения учащихся в реальные задачи беспилотной робототехники – от моделирования и симуляции до разработки алгоритмов автономного управления. В основе проекта лежит идея сделать передовые технологии доступными, гибкими и масштабируемыми в рамках школьного и дополнительного образования.
Интеграция аппаратной и программной платформ
МКАР 3.1 – это аппаратно-программный комплекс, включающий физическую модель робота и цифровую симуляционную среду. Такая двойная архитектура позволяет выстраивать полноценный цикл разработки: проектирование – программирование – отладка – испытания. Симулятор даёт возможность учащимся начать работу без физического оборудования, а реальный робот – проверить и улучшить полученные алгоритмы в действии.
Физическая платформа построена на двухуровневой системе управления:
- Верхний уровень – микрокомпьютер Raspberry Pi 5 с предустановленной ROS2, отвечает за обработку сенсорных данных, построение карты и навигацию.
- Нижний уровень – микроконтроллер Arduino UNO R4 Minima, реализует низкоуровневое управление приводами, обработку сигналов с простых датчиков и выполнение команд от верхнего уровня.
Такой подход воспроизводит реальные архитектурные принципы построения автономных систем и позволяет учащимся понять, как устроены промышленные решения.
Поддержка автономного и ручного управления
Система управления позволяет реализовывать как ручной режим – с передачей команд от пользователя, так и полностью автономный – с построением карты, распознаванием препятствий и самостоятельной навигацией. Это открывает широкие возможности для обучения: от простого программирования движения до создания сложных сценариев поведения в замкнутой среде.
Использование лидара Lslidar N10 и ИК-датчиков дистанции позволяет создавать карты местности, распознавать препятствия и принимать решения в режиме реального времени. Наличие всенаправленных колес (голономной системы) значительно расширяет маневренность робота, позволяя ему двигаться в любом направлении, включая боковое и диагональное перемещение, без необходимости разворота корпуса.
Аппаратно-программный комплекс
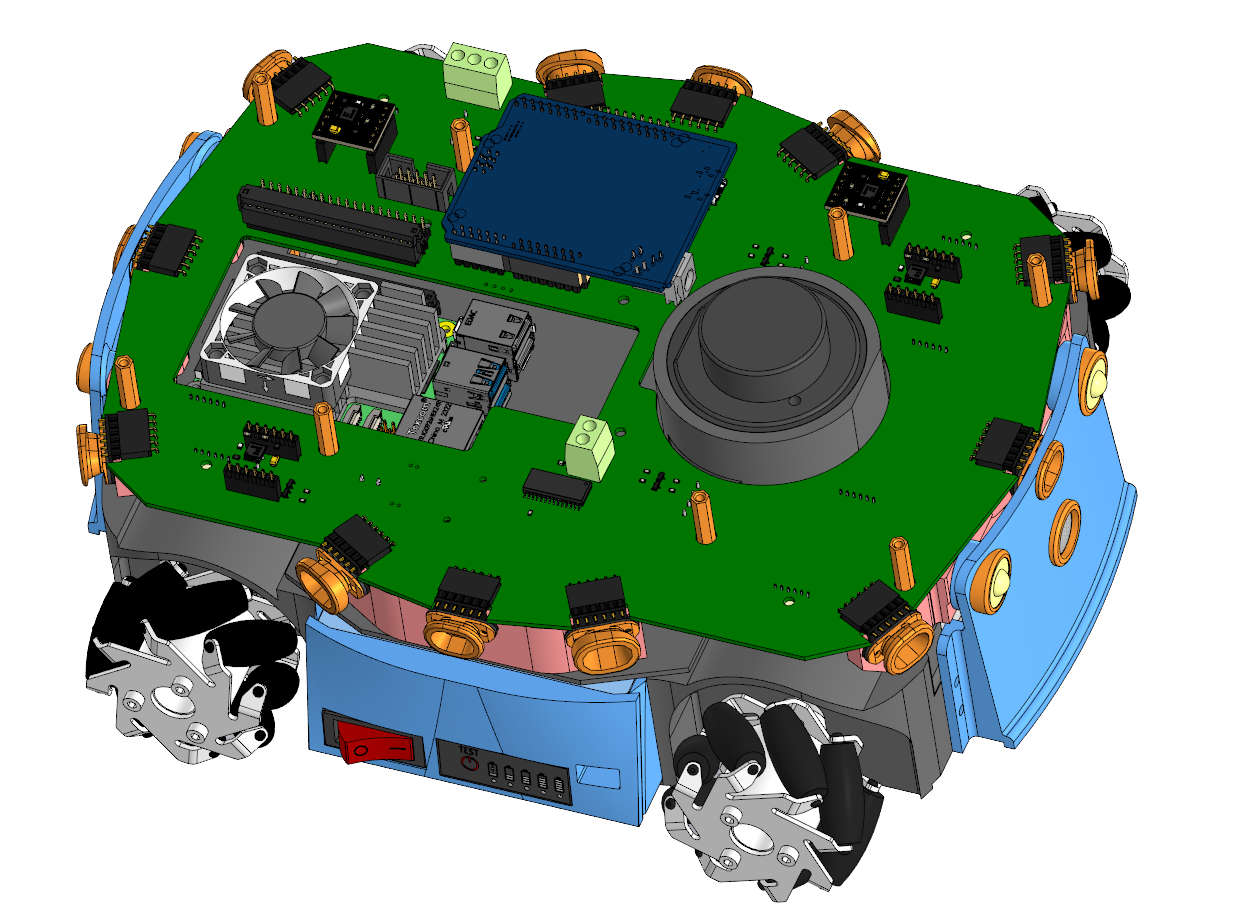
Внутреннее устройство МКАР 3.1
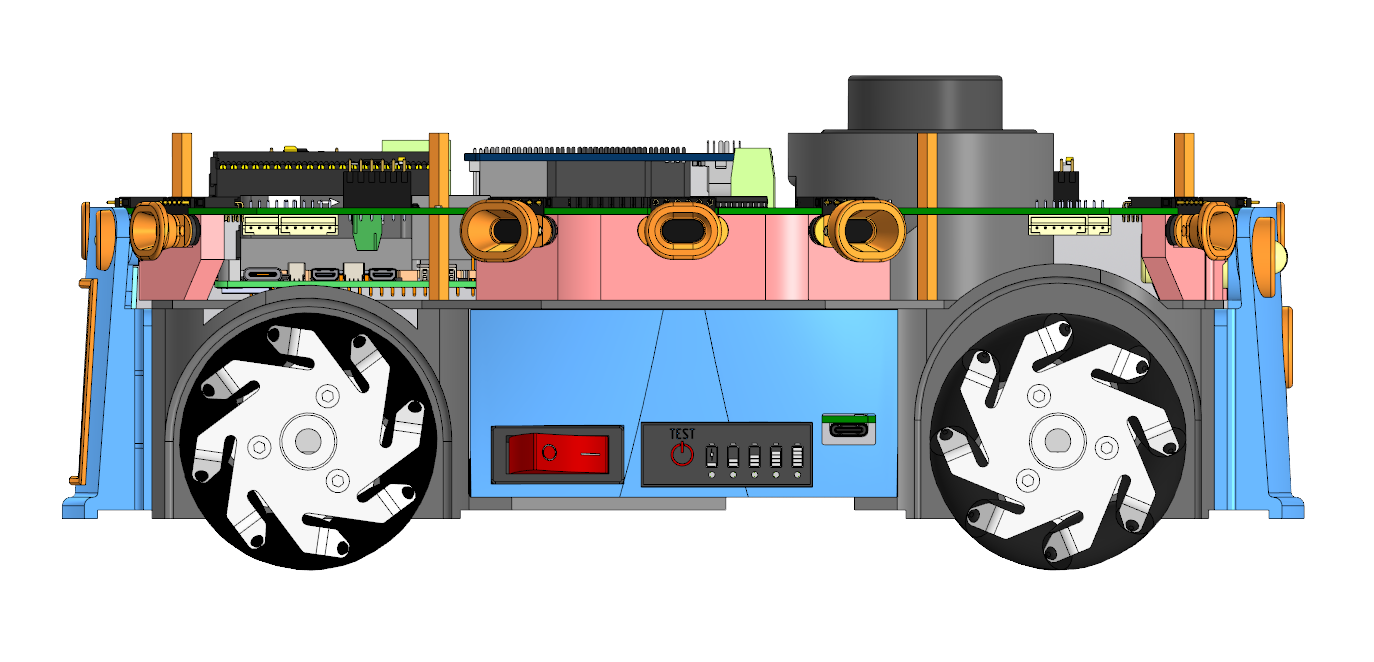
Внутреннее устройство МКАР 3.1. Вид сбоку.
Гибкая и масштабируемая симуляционная среда
Программный комплекс включает в себя готовый образ виртуальной машины и сборку для Clonezilla, что позволяет развернуть среду разработки на любом ПК. В составе программной части:
- ROS2 Jazzy – основа для построения модульных распределённых систем;
- Gazebo – симулятор с реалистичной физикой;
- RVIZ – средство визуализации данных сенсоров и состояния робота;
- Набор библиотек на Python и C++ – для разработки и тестирования пользовательских алгоритмов.
Виртуальный двойник МКАР позволяет протестировать написанные программы без риска повредить оборудование, что особенно важно на ранних этапах обучения.
Образовательный курс от основ до продвинутого уровня
Проект сопровождается оригинальным образовательным курсом, разработанным специально для работы с МКАР. Курс охватывает:
- основы работы в ОС Ubuntu;
- программирование на Python и C++ для робототехнических задач;
- программирование микроконтроллеров Arduino;
- создание и настройку программных модулей ROS2;
- реализацию базовых и продвинутых сценариев движения, картографии и навигации.
Программа включает практические задания, проекты и подготовку к соревнованиям, что делает обучение динамичным и мотивирующим.
Адаптация под разные уровни подготовки
МКАР 3.1 подходит как для школьников, только начинающих знакомство с робототехникой, так и для учащихся старших классов и педагогов, стремящихся углубить знания в области автономных систем. Благодаря модульности, робот может использоваться для простых экспериментов с ИК-датчиками, а также для сложных проектов с построением SLAM-карт, планированием маршрута и взаимодействием с цифровыми сервисами.
Детали
Проект МКАР 3.1 опирается на современную техническую архитектуру и глубокую образовательную проработку. Его ключевое преимущество – сочетание практической инженерной платформы с возможностью тиражирования в школьной среде. В этой секции представлены основные технические, методические и организационные аспекты реализации проекта.
Аппаратная архитектура
Конструкция и шасси
- МКАР 3.1 выполнен в виде компактного колесного робота с модульным корпусом, что позволяет адаптировать конструкцию под различные задачи: добавление новых сенсоров, манипуляторов, камер.
- Материалы корпуса совместимы с 3D-печатью и лазерной резкой – это делает возможным быструю модернизацию и ремонт в условиях школьной мастерской или ФабЛаба.
- Используется голономная схема движения (всенаправленные колеса), позволяющая роботу двигаться не только прямо или назад, но и вбок, по диагонали и разворачиваться на месте. Такая система обеспечивает высокую маневренность, особенно актуальную при навигации в ограниченных пространствах.
Сенсоры и исполнительные устройства
- Лидар (Lslidar N10) обеспечивает круговой обзор и используется для построения карт (SLAM) и навигации.
- ИК-датчики расстояния (VL53L0X) устанавливаются по периметру корпуса, позволяют реализовать базовые алгоритмы избегания препятствий и исследования пространства.
- Камера (возможна установка камеры CSI или USB-видеомодуля) применяется для задач компьютерного зрения, распознавания маркеров или движения по визуальным ориентирам.
- Дополнительно возможна интеграция гироскопов, акселерометров, сенсоров освещённости, температуры и влажности, что расширяет спектр задач и открывает возможности кросс-предметного применения в естественнонаучных дисциплинах.
Вычислительная платформа
- Верхний уровень – одноплатный компьютер Raspberry Pi 5. Используется для высокоуровневой логики, работы с ROS2, обработки сенсорных данных, планирования маршрутов, взаимодействия с пользовательским интерфейсом.
- Нижний уровень – микроконтроллер Arduino UNO R4 Minima, выполняющий команды на уровне управления моторами, чтения сигналов с датчиков, обеспечения обратной связи.
- Взаимодействие между уровнями реализуется через последовательный интерфейс (UART) с использованием стандартных ROS-нод.
Моторы и драйверы
- Используются мощные моторы с редукторами, обеспечивающие точный контроль скорости и направления.
- Каждый мотор подключён к независимому каналу драйвера, что позволяет точно настраивать движение каждой пары колёс – критически важно для систем с голономным приводом.
- Поддерживается как дифференциальное, так и омнинаправленное управление.
Программная среда
Операционная система и middleware
- Основной рабочей средой является ROS2 (Robot Operating System) версии Jazzy – современный открытый фреймворк для построения распределённых робототехнических систем.
- Установлена на Raspberry Pi 5 вместе с ОС Ubuntu 22.04 LTS, что даёт возможность использования широкого набора инструментов разработки.
Средства моделирования и визуализации
- Gazebo – физически достоверный симулятор для отработки сценариев поведения робота в виртуальной среде. Используется как основное средство отладки.
- RVIZ – интерфейс визуализации, отображающий карты, данные с сенсоров, положение и ориентацию робота, маршруты движения и другое.
- RQt и терминальные инструменты ROS – для запуска, диагностики и логирования состояния узлов системы.
Доступные интерфейсы
- Поддержка подключения оборудования и периферии по интерфейсам I2C, SPI, UART, USB, CSI, GPIO – это обеспечивает гибкость расширения функционала.
- Возможность беспроводного соединения по Wi-Fi или Bluetooth, что даёт удобство при использовании в классе и организации соревнований.
Методическая и учебная база
Образовательный курс
- Курс сопровождается пособием и электронными материалами, включающими:
- основы работы в Ubuntu;
- основы Python и C++ в контексте робототехники;
- разработку узлов ROS2;
- взаимодействие с микроконтроллером Arduino;
- построение SLAM-карт, управление движением и обработку сенсорных данных.
- Материалы адаптированы под разный уровень подготовки: от школьников начального уровня до преподавателей, желающих повысить квалификацию.
Сценарии использования
- Внеклассная работа: кружки, проектные занятия, секции.
- Учебные курсы: элективные предметы, предметы дополнительного образования.
- Соревнования и олимпиады: моделирование задач автономной навигации, прохождение лабиринтов, следование по траектории, избегание препятствий.
Инфраструктура проекта
- МКАР 3.1 внедряется в школах Санкт-Петербурга как часть пилотного проекта. Список учреждений уже включает более десятка школ, в которых проходит апробация и методическая доработка.
- Работа организуется при поддержке профильных педагогов, методистов и кураторов инженерных классов.
- Предусмотрена техническая поддержка: инструктажи, документация, форумы, обновления ПО.
Технологии
| Языки программирования и фреймворки | С, С++, Python, URDF |
| OS | Ubuntu |
| CVS | Git (Gitlab) |
| IDE | Arduino IDE, Visual Studio |
Модель разработана в целях выполнения задач по мероприятию «Тиражирование лучших практик передовых инженерных школ для подготовки и переподготовки инженеров» проекта «Цифровое моделирование, проектирование и оптимизация производственных процессов и деятельности компаний реального сектора экономики» в соответствии с планом реализации программы Передовой инженерной школы «Цифровой инжиниринг».
Федеральный проект «Передовые инженерные школы» реализуется Министерством науки и высшего образования РФ с целью обеспечения квалифицированными кадрами высокопроизводительные и экспортно-ориентированные секторы экономики страны.
Ключевые исполнители
- Лаборатория «Промышленные системы потоковой обработки данных» ПИШ СПбПУ
Ключевые участники
- Руководитель проекта: Г.С. Васильянов, старший преподаватель Высшей школы передовых цифровых технологий и Высшей школы компьютерных технологий и информационных систем СПбПУ
- Научный руководитель: М.В. Болсуновская, заведующий Лаборатории ПСПОД ПИШ СПбПУ, доцент Высшей школы компьютерных технологий и информационных систем СПбПУ