Малогабаритный колесный автономный робот (МКАР). Версия 3.0
Практический образовательный комплекс, направленный на изучение робототехники, программирования и принципов работы беспилотных систем
Задача
Развивая инициативы по интеграции современных цифровых технологий в образовательный процесс, лаборатория «Промышленные системы потоковой обработки данных» передовой инженерной школы «Цифровой инжиниринг» Санкт-Петербургского политехнического университета Петра Великого (ПИШ СПбПУ), продолжает разрабатывать семейство малогабаритных колесных автономных роботов (МКАР) – учебно-методические комплексы, направленные на углубленное изучение робототехники, программирования и принципов работы беспилотных систем.
Одной из ключевых задач ПИШ СПбПУ является формирование непрерывной системы инженерного образования «школа – колледж – вуз – промышленность». Для этого разрабатываются инновационные образовательные инструменты, которые позволяют учащимся уже на школьном этапе осваивать навыки, востребованные в высокотехнологичных отраслях.
В конце 2024 года, совместно с Академией Цифровых Технологий, был реализован проект по изготовлению и поставке 45 комплектов моделей МКАР первого поколения (МКАР версия 2.0) в 15 школ Санкт-Петербурга, включающий непосредственно сам МКАР, методические пособия, руководства по эксплуатации и настройке моделей и их окружения.
Осознавая важность дальнейшей реализации подобных проектов, а также развития отрасли как таковой, было принято решение о дальнейшем расширении семейства МКАР за счёт увеличения продуктовой линейки с одновременным улучшением функционирования и расширением функционала.
Кроме того, в связи с экспансией на рынок робототехнических устройств новой операционной системы для роботов ROS2, было принято решение новую модель робота реализовывать на базе именно её.
Таким образом, была создана модель МКАР версия 3.0 или МКАР второго поколения.
МКАР 3.0 предназначен для:
- Школьников — для освоения базовых и продвинутых навыков в работе с операционной системой Ubuntu, освоению программирования на Python и C++, освоению программирования микроконтроллеров Arduino, работе с ROS 2 (Robot Operating System), проектирования алгоритмов навигации и управления беспилотным транспортом.
- Педагогов — в качестве готового решения для проведения уроков, внеклассных занятий и подготовки к соревнованиям по робототехнике.
- Образовательных учреждений — как инструмент интеграции передовых инженерных практик в учебные программы.
Главная цель МКАР 3.0 осталась неизменной – сделать изучение технологий беспилотного транспорта доступным и увлекательным. Робот оснащен системами ориентации в пространстве, а его виртуальный симулятор позволяет проводить отладку ПО без физического устройства. Это не только снижает барьер входа для начинающих, но и готовит учащихся к решению реальных задач, с которыми сталкиваются инженеры в области беспилотных систем.
Проект также решает задачу ранней профориентации: через практическую работу с МКАР школьники знакомятся с инженерными профессиями, учатся мыслить системно и применять знания в области IT, математики и физики для создания функциональных решений.
У МКАР 3.0 есть ряд ключевых особенностей:
- Конструкция робота позволяет модифицировать и дополнять его компоненты за счёт модулей расширения, которые будут представлены позже, что стимулирует творческий подход и инновационное мышление у учащихся.
- В отличие от робота МКАР0, в МКАР 3.0 применена конструкция шасси, включающая всенаправленные колёса или колёса Илона. Это позволяет существенно расширить возможности по перемещению робота в пространстве.
- Многоуровневая система управления, включающая разные уровни систем – нижний и верхний, что с одной стороны, позволяет разделять задачи по управлению между различными устройствами, аналогично тому, как происходит в реальной промышленной среде, а с другой стороны – позволяет, в случае необходимости, реализовывать проекты как с использованием одного нижнего уровня, так и с использованием обоих уровней управления.
- Отсутствие подвижных частей (кроме, непосредственно, самих колёс) и применение датчиков, работа которых происходит в закрытом корпусе, позволяет поднять уровень безопасности и отказоустойчивости конструкции в целом.
Решение
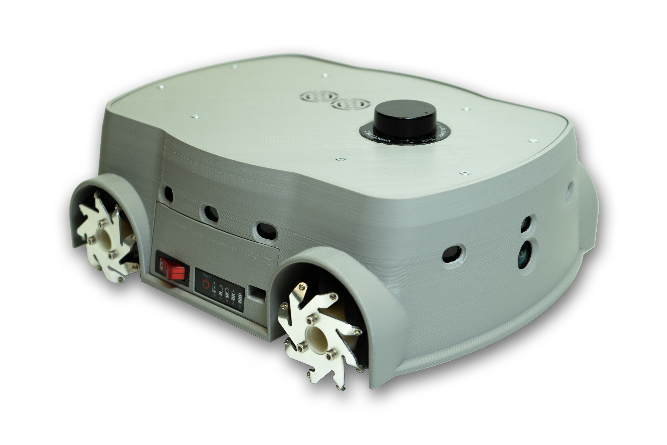
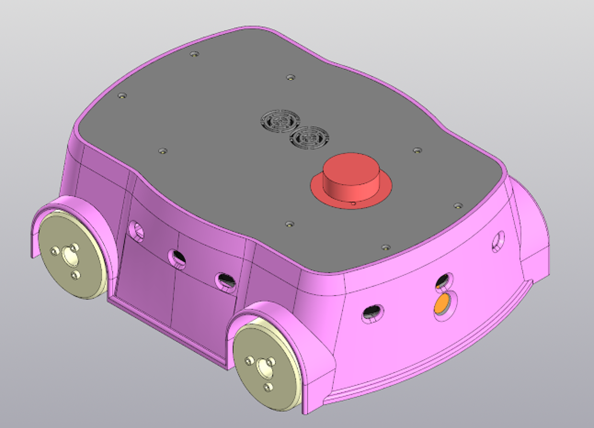
Проект малогабаритного колесного автономного робота МКАР 3.0 предлагает комплексное образовательное решение, сочетающее инновационную аппаратную платформу с всенаправленными колёсами Илона, специализированное программное обеспечение и методические материалы. МКАР 3.0 представляет собой компактную робототехническую модель, спроектированную для изучения программирования беспилотных систем, робототехники и промышленных технологий.
Технические особенности:
- Автономная навигация: Робот оснащен датчиками ориентации в пространстве (лидары, сенсоры), аналогичными тем, что используются в системах управления беспилотным транспортом. Это позволяет ему двигаться без участия оператора, избегая препятствий и выполняя задачи в реальном времени.
- Применение всенаправленных колёс Илона: Такой тип колёс позволяет существенно расширить возможности по перемещению робота в пространстве, так как применение данного типа колёс позволяет передвигаться как в «упрощённом» варианте – поворотом колёс одного борта, как в модели МКАР0, так и в «расширенном» варианте – когда за счёт сложного и слаженного движения колёс, робот может перемещаться на плоскости в любом направлении, включая перпендикулярные для оси робота
- Двойная среда разработки: На базе физической модели МКАР создана виртуальная модель-симулятор, которая имитирует поведение робота в цифровом пространстве в двух вариантах: как образ виртуальной машины и как образ для Clonezilla для развертывания на ПК. Это позволяет учащимся тестировать и отлаживать алгоритмы на Python и C++ без необходимости использования физической модели, сокращая время разработки и минимизируя риски повреждения устройства.
- Модифицируемость конструкции: Конструкция робота позволяет модифицировать и дополнять его компоненты за счёт модулей расширения, которые будут представлены позже, что стимулирует творческий подход и инновационное мышление у учащихся. Это даст возможность школам модифицировать конструкцию под конкретные учебные задачи или творческие проекты.
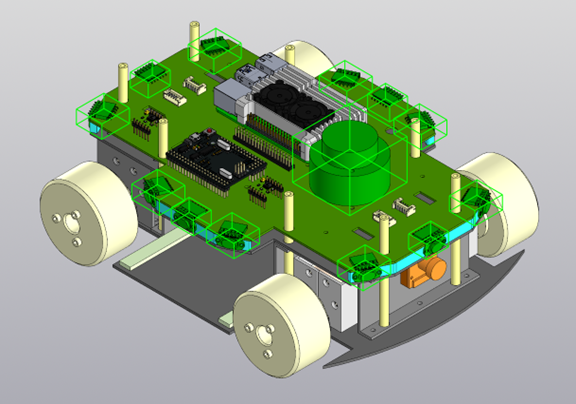
Аппаратно-программный комплекс
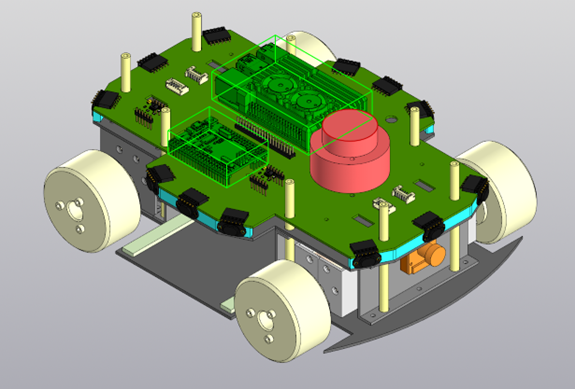
Верхний и нижний уровни управления МКАР 3.0
Лидары и датчики дистанции
Образовательный функционал:
- Полный цикл обучения: МКАР0 будет сопровождаться учебно-методическим комплектом, включающим материалы от базовых уроков по основам Ubuntu, Python и C++ до продвинутых заданий по с Arduino и с ROS2 (Robot Operating System). Школьники научатся писать код для управления движением, настройки навигации и обработки данных с датчиков.
- Соревновательная практика: Платформа МКАР0 также, как и платформа МКАР 2.0, может быть интегрирована в формат соревнований, таких как «Программирование беспилотных систем». Участники смогут решать задачи по автономному прохождению помещений, что позволит развить навыки проектного мышления и командной работы.
- Поддержка педагогов: Для учителей будут разработаны курсы повышения квалификации, где они освоят работу с МКАР0, научатся интегрировать его в учебные программы и готовить учеников к участию в олимпиадах.
Масштабируемость проекта:
- Тиражирование в школах: К концу 2024 года изготовлено 45 моделей МКАР первого поколения, переданных в 15 школ Санкт-Петербурга. Каждый комплект включает робота, методические материалы и доступ к симулятору.
- Сетевой подход: Проект реализуется в партнерстве с Академией цифровых технологий, которая координирует распределение устройств по школам и организует мероприятия для учащихся.
- Связь с индустрией: Использование промышленных технологий (например, ROS2) обеспечивает преемственность между учебными задачами и реальными кейсами в области автономного транспорта.
Ключевые преимущества:
- Доступность: Упрощенная конструкция и открытая документация делают МКАР 3.0 идеальным решением для школ с ограниченным бюджетом.
- Практико-ориентированность: Ученики работают с теми же инструментами, что и инженеры в сфере беспилотных систем.
- Гибкость: Возможность кастомизации робота и интеграции дополнительных модулей (например, манипуляторов или новых датчиков) расширяет спектр учебных сценариев
МКАР 3.0 – это не просто робот, а полноценная экосистема, которая объединяет технологии, образование и индустриальные стандарты, помогая школьникам сделать первые шаги в профессии и подготовиться к вызовам цифровой экономики.
Детали
Проект малогабаритного колесного автономного робота (МКАР) сочетает в себе тщательно продуманную техническую базу, образовательную методологию и инфраструктурную поддержку.
Техническое устройство МКАР 3.0
Аппаратная часть:
Шасси: Унифицированная модульная конструкция, адаптированная для лазерной резки и 3D-печати. Позволяет легко заменять или модернизировать компоненты (например, добавлять манипуляторы).
Сенсоры:
- Лидар (Lslidar N10).
- Инфракрасные датчики дистанции (Vl53l1x) для обнаружения препятствий.
- Стереокамера и камера глубины.
- Гироскоп и акселерометр.
- Возможно подключение дополнительных сенсоров и оборудования по интерфейсам I2C, SPI, UART, GPIO, CSI, USB.
Вычислительный модуль: Одноплатный компьютер (например, Raspberry PI5 или аналоги) с предустановленной ROS2 (Robot Operating System).
Привод: Электродвигатели c бортовой системой поворота для точного управления скоростью и направлением движения.
Программный комплекс:
- ROS-интеграция: Робот поддерживает стандартные пакеты ROS2, что позволяет учащимся работать с промышленными инструментами.
- Виртуальный симулятор: Реализован на базе Gazebo или аналогичной среды. Имитирует физику движения, данные с датчиков и взаимодействие с виртуальными объектами.
- Библиотеки Python: Готовые модули для управления движением, обработки данных сенсоров и настройки автономных сценариев.
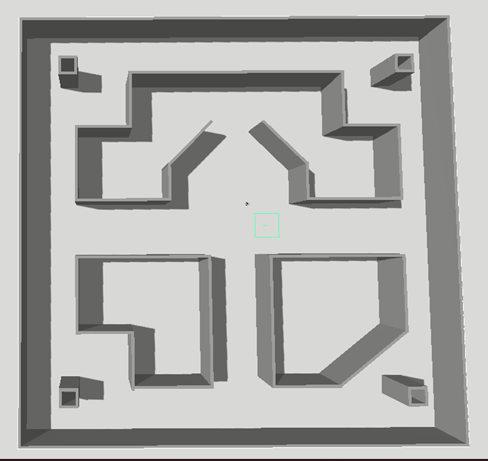
Виртуальное представление работы МКАР (симулятор)
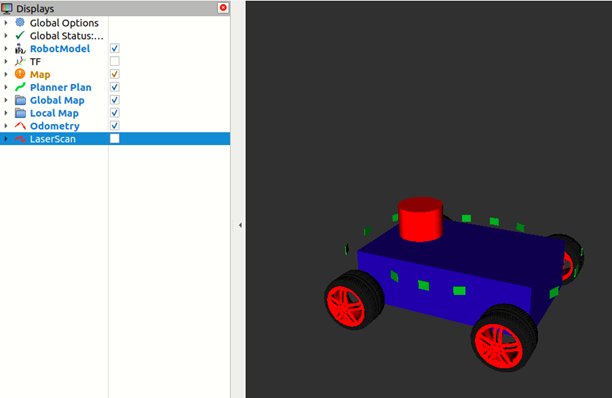
Виртуальное представление работы МКАР (симулятор)
Учебно-методический комплекс
Учебное пособие:
Предполагаемое содержание:
- Основы Ubuntu для робототехники.
- Основы Python для робототехники.
- Основы C++ для робототехники.
- Программирование Arduino для робототехники.
- Работа с ROS2: создание узлов, топиков, сервисов.
- Алгоритмы SLAM (Simultaneous Localization and Mapping) и навигации.
- Примеры проектов: от простых (движение по линии) до сложных (автономное прохождение лабиринта).
Курс обучения:
- Этап 1: Знакомство с интерфейсом симулятора и базовыми командами.
- Этап 2: Программирование физического робота – калибровка датчиков, настройка двигателей.
- Этап 3: Разработка автономных алгоритмов (например, движение по карте с избеганием препятствий).
- Этап 4: Участие в соревнованиях и защита проектов.
Учебное пособие для курса
Партнеры и инфраструктура
- Академия цифровых технологий:
- Координирует распределение МКАР по школам.
- Организует соревнования (например, юниорскую линейку «Программирование беспилотных систем»).
- Комитет по образованию Санкт-Петербурга:
- Поддержка на уровне городских программ и финансирования.
- Интеграция МКАР в стратегию развития инженерных классов.
- Промышленные партнеры:
- Использование промышленных стандартов (ROS2, Gazebo) обеспечивает связь с реальными кейсами автономного транспорта.
Перспективы развития
Перспективы развития проекта включают расширение линейки роботов семейства МКАР: внедрение модулей компьютерного зрения для распознавания объектов, интеграцию с IoT-платформами. Планируется масштабирование инициативы на другие регионы России, а также включение МКАР 3.0 в программы всероссийских олимпиад и хакатонов, таких как WorldSkills Russia.
Таким образом, МКАР – это не просто учебный робот, а комплексная экосистема, объединяющая инженерные инновации, педагогические методики и сетевую коллаборацию. Его детализация демонстрирует, как современные технологии могут стать основой для формирования навыков, востребованных в эпоху цифровой трансформации.
Технологии
| Языки программирования и фреймворки | С, С++, Python, URDF |
| OS | Ubuntu |
| CVS | Git (Gitlab) |
| IDE | Arduino IDE, Visual Studio |
Модель разработана в целях выполнения задач по мероприятию «Тиражирование лучших практик передовых инженерных школ для подготовки и переподготовки инженеров» проекта «Цифровое моделирование, проектирование и оптимизация производственных процессов и деятельности компаний реального сектора экономики» в соответствии с планом реализации программы Передовой инженерной школы «Цифровой инжиниринг».
Федеральный проект «Передовые инженерные школы» реализуется Министерством науки и высшего образования РФ с целью обеспечения квалифицированными кадрами высокопроизводительные и экспортно-ориентированные секторы экономики страны.
Ключевые исполнители
- Лаборатория «Промышленные системы потоковой обработки данных» ПИШ СПбПУ
Партнёры
- ГБНОУ «Академия цифровых технологий»
Ключевые участники:
- Руководитель проекта: Г.С. Васильянов, старший преподаватель Высшей школы передовых цифровых технологий и Высшей школы компьютерных технологий и информационных систем СПбПУ
- Научный руководитель: М.В. Болсуновская, заведующий Лаборатории ПСПОД ПИШ СПбПУ, доцент Высшей школы компьютерных технологий и информационных систем СПбПУ