В Лаборатории ПСПОД зарегистрирована полезная модель для автономных роботов
Инженеры лаборатории предложили новое решение для малогабаритных беспилотных транспортных систем.
Лаборатория «Промышленные системы потоковой обработки данных» ПИШ «ЦИ» СПбПУ зарегистрировала полезную модель «Шасси на базе несуще-управляющей печатной платы для колёсного автономного робота-автомобиля (СКАРА)».
Авторами технического решения выступили:
- Марина Болсуновская, заведующий Лабораторией ПСПОД ПИШ СПбПУ;
- Георгий Васильянов, научный сотрудник Лаборатории ПСПОД ПИШ СПбПУ;
- Эдуард Джужуев, инженер Лаборатории ПСПОД ПИШ СПбПУ.
Полезная модель разработана в рамках реализации проекта «Цифровое моделирование, проектирование и оптимизация производственных процессов и деятельности компаний реального сектора экономики». Данный проект выполняется в составе Передовой инженерной школы «Цифровой инжиниринг» и направлен на создание новых цифровых решений для российской промышленности. Исследования финансируются за счёт федерального бюджета в соответствии с соглашением № 075-15-2022-1154 от Минобрнауки России.
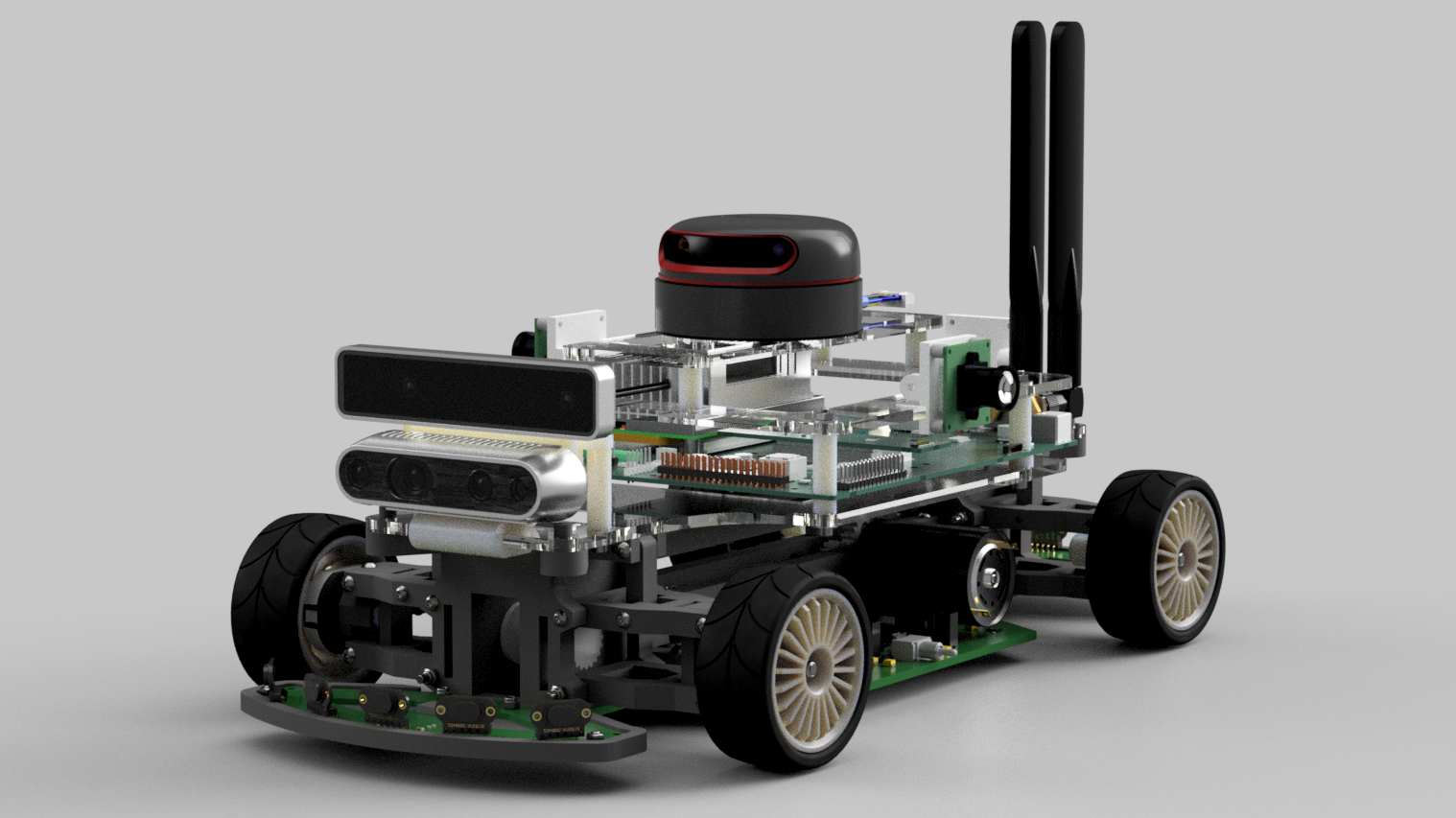
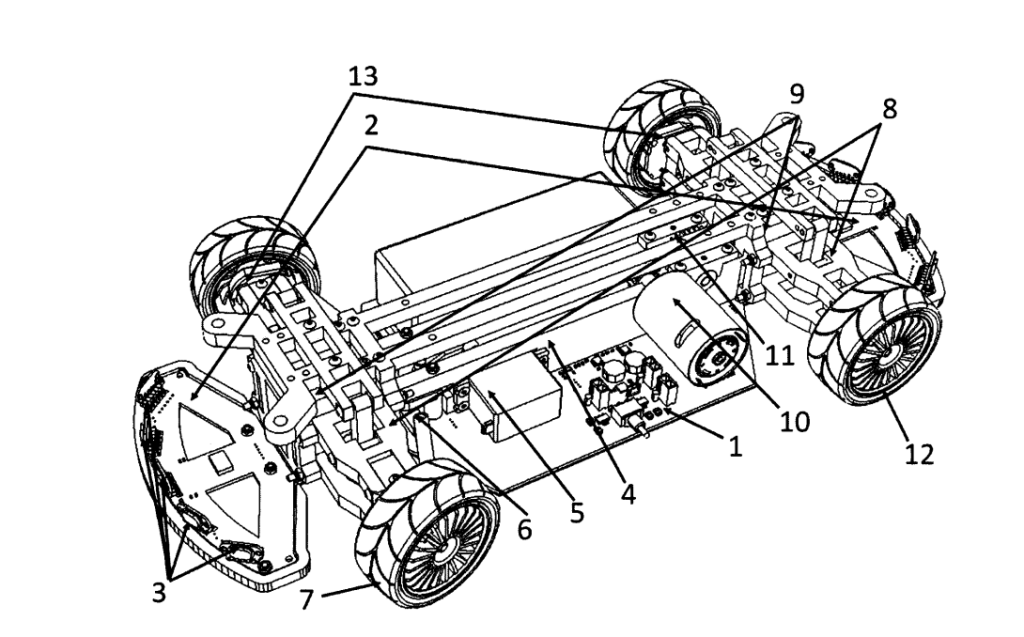
Основная идея зарегистрированной полезной модели – интеграция управляющей электроники и конструкционных элементов в единую печатную плату, которая выполняет функции как несущего элемента, так и управляющего узла. Это шасси, разработанное для автономной мобильной платформы СКАРА, позволяет упростить конструкцию, снизить габариты и массу устройства, а также облегчить его сборку и обслуживание.
Шасси включает сервопривод рулевого механизма, двигатель постоянного тока, коробки дифференциала, систему подвески, а также до 14 датчиков дистанции. Все элементы соединены и управляются посредством компонентов, смонтированных на одной печатной плате, выполненной из прочного материала FR4. На плате размещены микроконтроллер, блок питания, драйверы моторов, модули для передачи данных и управления сервоприводами, а также интерфейсы для взаимодействия с датчиками и энкодерами.
Такая конструкция обеспечивает высокую степень интеграции и масштабируемость решения. В зависимости от задач и условий эксплуатации возможно варьировать габариты шасси, количество колёс, параметры подвески и логики управления. Это делает платформу универсальной основой для создания мобильных робототехнических систем в сферах логистики, мониторинга, инспекции объектов и других прикладных задач.
Руководитель проекта Марина Болсуновская отмечает, что подобные разработки позволяют не только создавать эффективные цифровые прототипы, но и переходить к быстрой и технологичной сборке опытных образцов.
Регистрация полезной модели – важный шаг в развитии собственных интеллектуальных решений в области робототехники и подтверждение научно-технического уровня инженерной школы СПбПУ.

