Лаборатория ПСПОД Центра НТИ СПбПУ завершает 2 этап разработки малогабаритной модели беспилотного автомобиля
Проектная команда Лаборатории «Промышленные системы потоковой обработки данных» Центра НТИ СПбПУ проводит испытания модели беспилотного автомобиля в виртуальной среде и планирует в июне 2020 года завершить 2-й этап разработки.
Устройство создано как учебно-демонстрационная платформа для обучения технологиям построения автономных транспортных систем. Благодаря модели студенты технических вузов и специалисты смежных специальностей, стремящиеся повысить квалификацию, смогут изучить весь арсенал технологий, используемых в настоящее время конструкторами для построения систем ADAS (Advanced Driver Assistance System).
Проект выполняется совместно с Инжиниринговым центром «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ в рамках реализации проекта полигона-демонстратора (TestBed) новых производственных технологий и проведения на базе TestBed образовательных мероприятий для подготовки и повышения квалификации научных и инженерно-технических кадров, презентации передовых разработок и компетенций в сфере новых производственных технологий для представителей органов власти, промышленных предприятий, субъектов малого и среднего бизнеса. Разработанная модель войдет в состав материально-технической части полигона, открытие которого запланировано на 2020 год (ауд. Г.3.56 НИК СПбПУ). Руководит проектом TestBed команда научной лаборатории «Стратегическое развитие рынков инжиниринга» Центра НТИ.
В модели представлены все основные типы аппаратно-программных компонентов, задействованных при проектировании реальных беспилотных устройств. Все модули соответствуют передовым разработкам в данной отрасли и построены с применением технологий технического зрения, машинного обучения, имитационного моделирования и др. Как показали изыскания, проведенные перед началом работы, в России сейчас не существует аналогов учебно-демонстрационного комплекса такого уровня.
Программно-аппаратная платформа построена на базе микрокомпьютера NVidia Jetson TX2 и глубоко модифицированного шасси Traxxass 4-Tec 2.0. В состав стандартных датчиков входят: энкодеры, 10 высокоточных датчиков дистанции, лидар, камера глубины, трекинг-камера, 4 промышленные видеокамеры. ПО на основе фреймворка ROS Melodic включает в себя блоки построения карты, навигации, одометрии, управления движением, коммуникации между модулями, а также интеграции с аппаратными средствами под управлением контроллера STM. В модулях ПО, осуществляющих сбор и обработку информации с датчиков, использованы технологии технического зрения (сбор и объединение изображений с камер), машинного обучения (алгоритмы распознавания пешеходов) и искусственного интеллекта (расчет маршрута избегания динамических объектов/обхода препятствий в интеллектуальной системе управления).
Благодаря перечисленному набору компонентов модель сможет:
- Строить карты местности и ориентироваться на них;
- Выполнять поиск кратчайшего пути следования к точке на карте;
- Объезжать динамические препятствия;
- Распознавать различные знаки и атрибуты дорожной обстановки (разметку, дорожные знаки, пешеходов, другой транспорт) и реагировать на них;
- Строить обзорные изображения (surround view, bird view, orbital view и др).
Для отладки программного обеспечения используются технологии имитационного моделирования, что позволяет значительно ускорить процесс разработки. В симуляторе Gazebo создана виртуальная модель устройства со всеми датчиками, в настоящий момент проводятся испытания функционирования модели в ряде виртуальных пространств с препятствиями. Предварительные испытания показали, что программное обеспечение соответствующих блоков полностью выполняет поставленные задачи.
С целью улучшения технических характеристик платформы было решено доработать конструкцию шасси модели в сотрудничестве со специалистами Инжинирингового центра «Центр компьютерного инжиниринга» (CompMechLab) СПбПУ.
Сотрудниками Инжинирингового центра были сделаны расчёты текущего исполнения шасси, при котором диаметр разворота будет меньше 80 см. Для этого переработан рулевой механизм передней оси (поворотные кулаки, тяги, рычаги), благодаря чему угол поворота передних колёс увеличился с 30 до 45 градусов, а также изменена задняя подвеска, благодаря чему задняя ось тоже стала управляемой с углом поворота 20 градусов и отдельным сервоприводом.
Таким образом, не только уменьшился радиус разворота модели, но и увеличилась гибкость в управлении платформой, так как на больших скоростях движения можно использовать поворот только передней оси, тем самым увеличивая устойчивость, а на малых скоростях подключать к управлению заднюю ось для улучшения манёвренности.
Верхняя дека (прозрачная конструкция из оргстекла) в дальнейшем будет заменена на деку, спроектированную с применением подходов бионического дизайна. На данный момент сотрудники Инжинирингового центра завершили замеры и приступили к разработке деки.
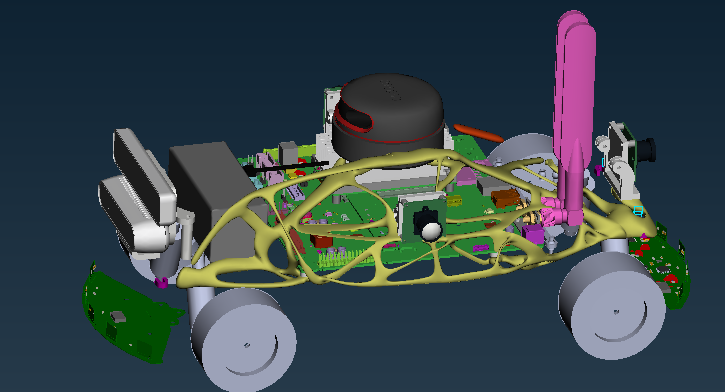
Макет корпуса модели с декой, спроектированной с применением подходов бионического дизайна
Модульность конструкции позволяет перестраивать устройство под различные задачи. Программная часть написана на основе открытого ПО для свободы дальнейшей модификации устройства. Платформа удобна в эксплуатации благодаря небольшим габаритам (40х25см) и маленькому радиусу разворота (менее 40 см).
Разработка тестового образца (1 этап) завершена. Сейчас ведется работа в рамках 2-го этапа, подразумевающего создание опытного образца модели с возможностью построения карт местности, навигации, ориентации и обхода препятствий, окончание работ намечено на июнь 2020 года. 3 этап, который планируется завершить в 2021 году, включает в себя разработку коммерческого образца платформы и реализацию ADAS.
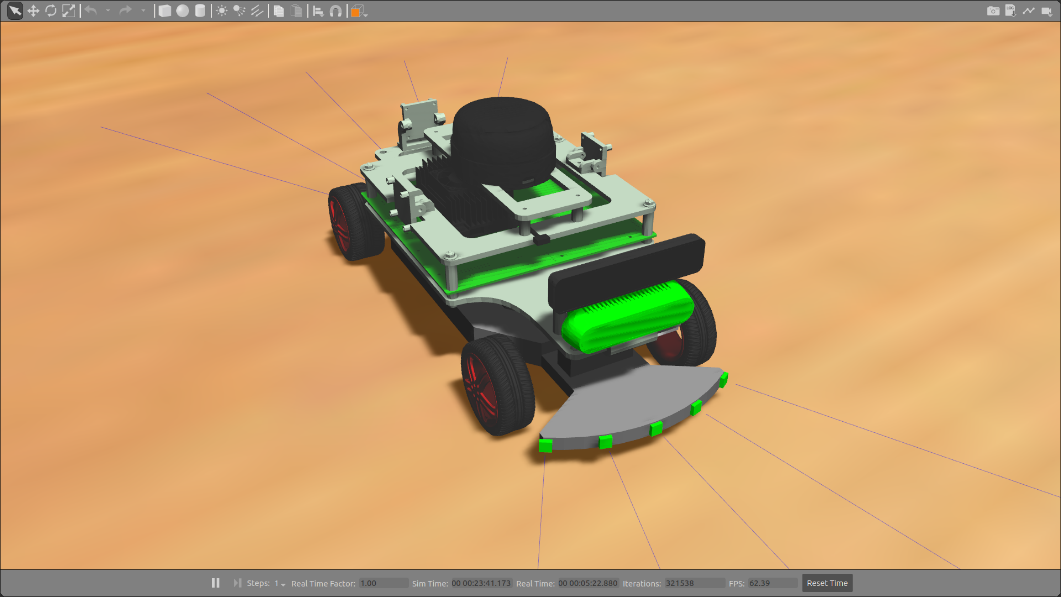
Виртуальная модель в симуляторе Gazebo

Исходная карта местности в симуляторе Gazebo, имитирующая физическую среду с препятствиями для прохождения модели
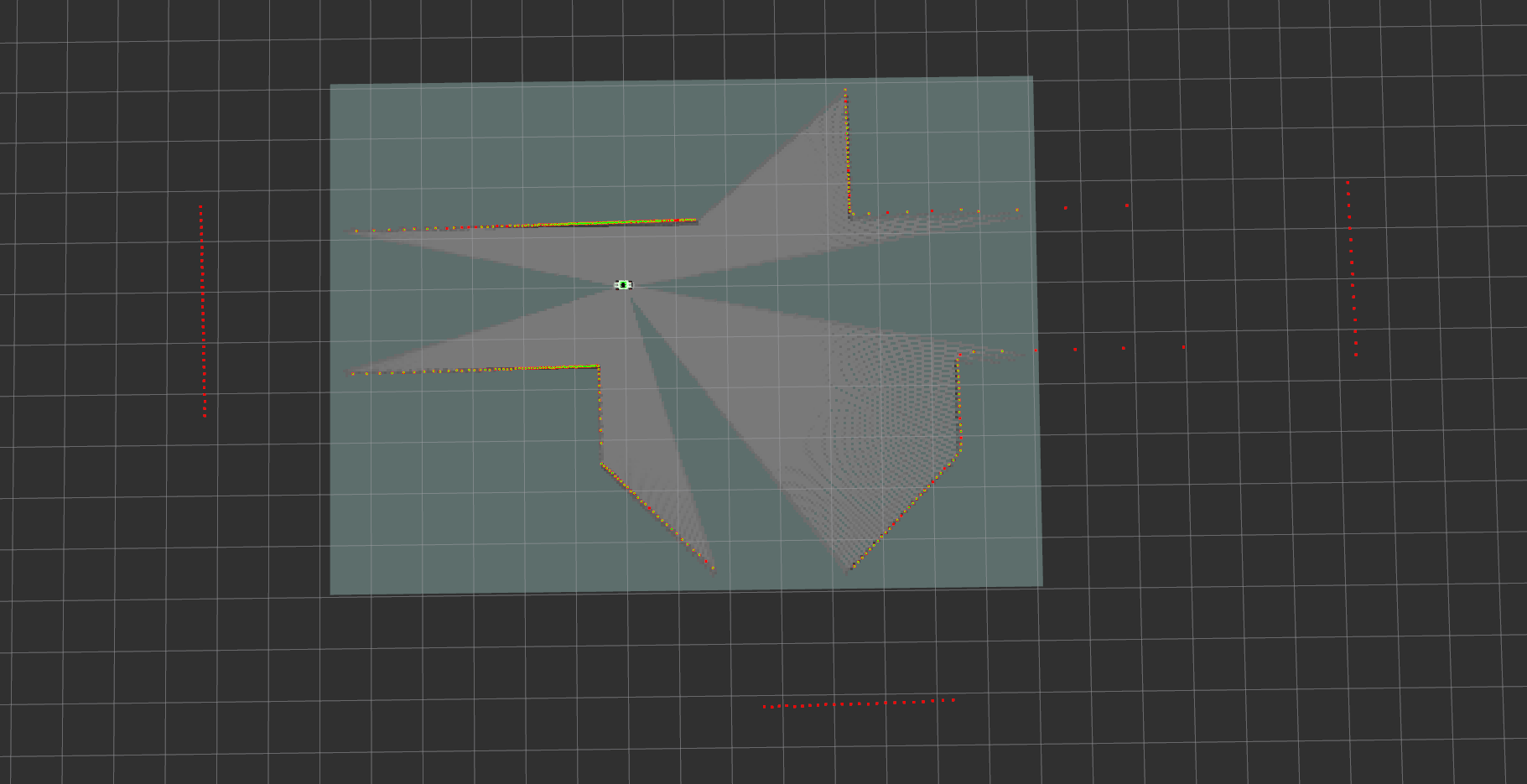
Карта местности, созданная моделью с помощью данных лидара после включения, до начала движения
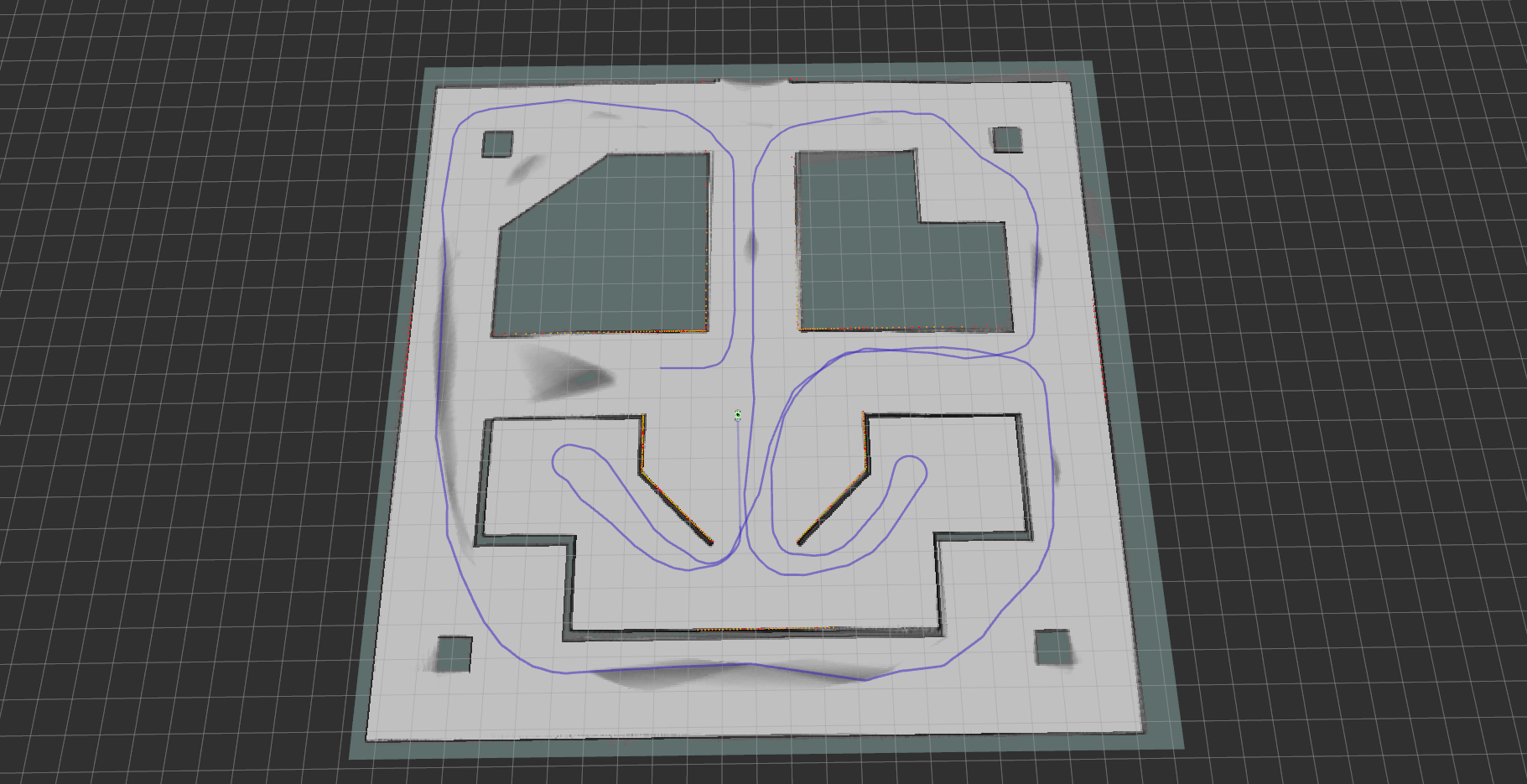
Карта местности, построенная моделью с помощью данных лидара и блока построения карты (картографера) после прохождения пути

